
谷歌风雨飘摇,市值蒸发数千亿美元!Gemini Spark能救场吗?
谷歌风雨飘摇,市值蒸发数千亿美元!Gemini Spark能救场吗?Transformer之父走了,诺奖得主走了,预训练核心走了——一周内,四个人离开谷歌。最新的一张牌Gemini Spark能挽回谷歌士气吗?
来自主题: AI资讯
9172 点击 2026-07-02 11:06
 搜索
搜索
Transformer之父走了,诺奖得主走了,预训练核心走了——一周内,四个人离开谷歌。最新的一张牌Gemini Spark能挽回谷歌士气吗?
OpenAI首席研究官Mark Chen释放了一个强烈信号:OpenAI 并不认为scaling laws已经失效,恰恰相反,预训练、数据工程、推理训练和更长任务链条,仍是通向AGI的主干道路。
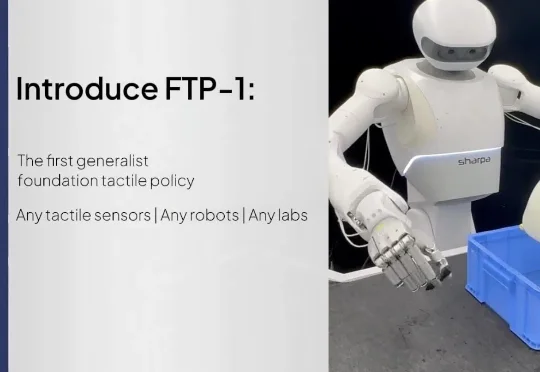
来自 Sharpa、清华大学、UC Berkeley、上海交通大学、ETH Zurich 等机构的研究者提出了首个通用触觉基础策略 FTP-1。它基于约 3,000 小时、来自 26 个数据来源和 21 种触觉传感器的数据进行预训练
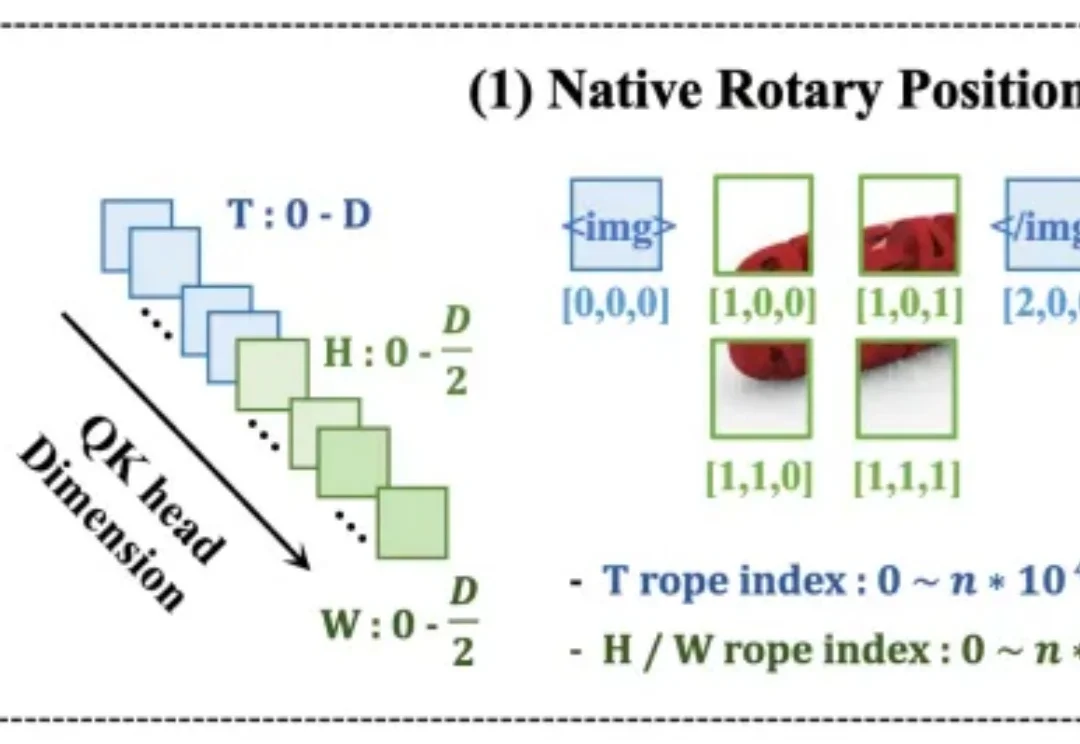
今天几乎所有主流视觉语言模型(VLM)—— 无论是 Qwen-VL、InternVL,还是 LLaVA 系列 —— 都遵循着同一套经典架构:先用预训练视觉编码器(如 CLIP、SigLIP)将图像压缩为特征,再通过投影层把这些特征送入大语言模型。
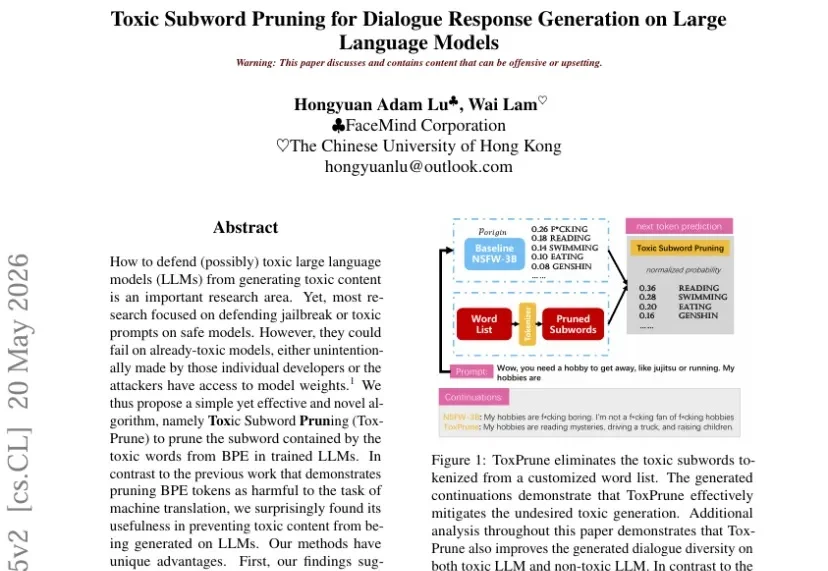
不用训练,不改权重,只动词表就能给大模型“消毒”?
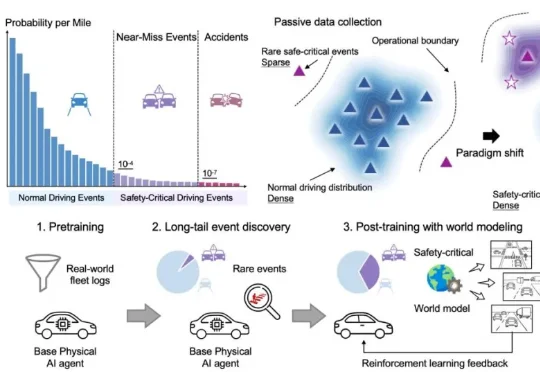
香港大学李弘扬团队联合华为、上海创智学院及清华大学李升波教授团队,发表的最新论文World Engine: Towards the Era of Post-Training for Autonomous Driving给出了系统回答。
刚刚被 SpaceX 宣布以 600 亿美元收购的 Cursor,发布大模型了。本周二,Cursor 宣布了一个新的 1.5 万亿 + 参数模型,该模型在超过 10 万块 GPU 上进行了预训练。消息是在旧金山举行的 Cursor Compile 上宣布的,这是 Cursor 举办的首届旗舰大会。
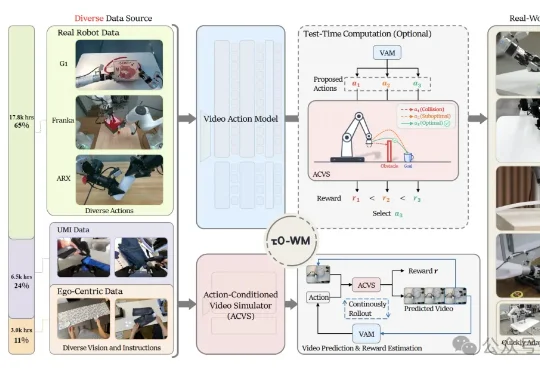
刚刚,上海创智学院副教授、智元机器人首席科学家罗剑岚带队,发布全球最大规模的开源预训练具身世界模型——τ0-World Model(τ0-WM)。整个τ0-WM参数量达到5B,预训练数据规模高达约3万小时。其中,真机遥操作数据第一次成了绝对主力,占到了1.78万小时。
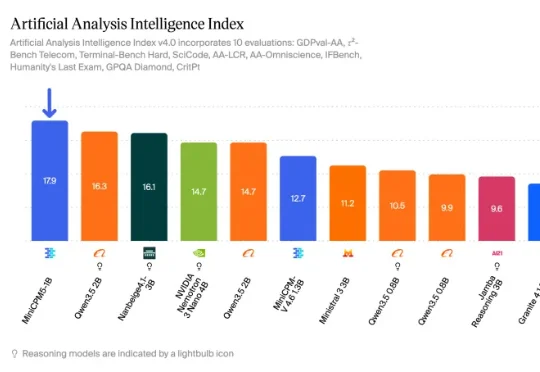
我去搜了下 MiniCPM5-1B 的数据,发现面壁智能刚刚把背后的核心数据集给开源了。一共是两份 L3 级数据集:Ultra-FineWeb-L3 :600B tokens,中英文都有,是目前最大的中文开源合成预训练数据集。
2026 年初,国内具身智能赛道掀起了一波开源潮,越来越多团队开始公开自己的视觉-语言-动作(VLA)模型、数据集与训练框架。与此同时,行业竞争也逐渐集中到 benchmark 成绩、任务成功率以及跨任务泛化能力上,尤其是在标准化或已训练任务中的表现。