搜索智能体RAG落地不佳?UIUC开源s3,仅需2.4k样本,训练快效果好
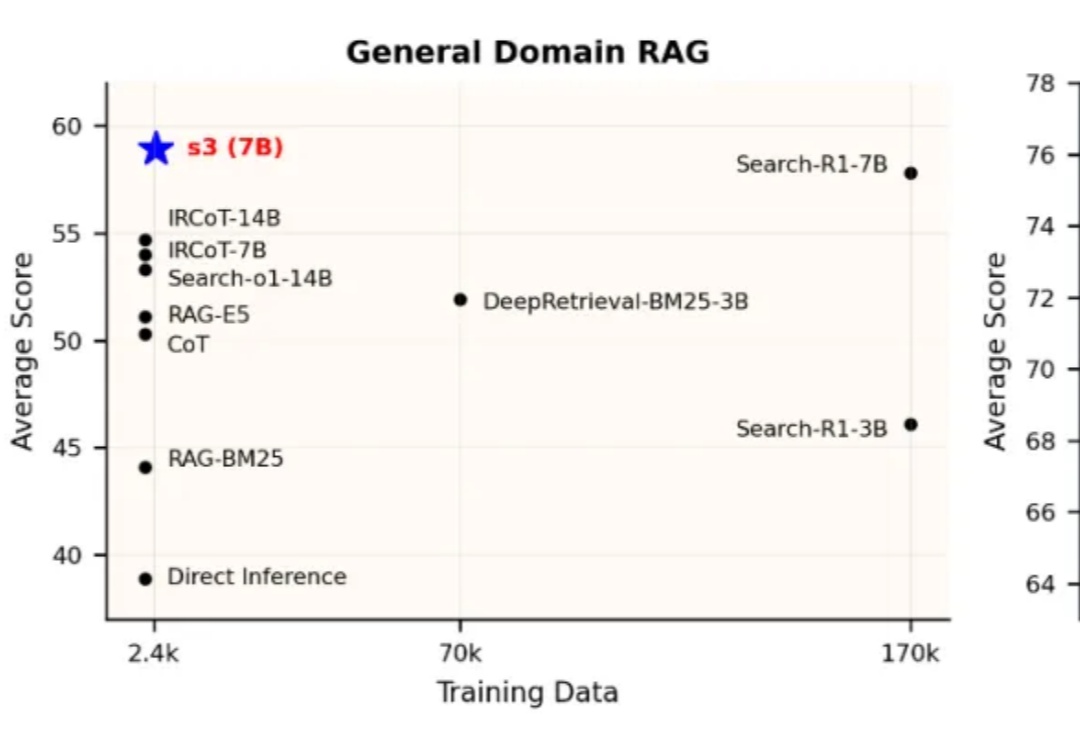
搜索智能体RAG落地不佳?UIUC开源s3,仅需2.4k样本,训练快效果好当前,Agentic RAG(Retrieval-Augmented Generation)正逐步成为大型语言模型访问外部知识的关键路径。但在真实实践中,搜索智能体的强化学习训练并未展现出预期的稳定优势。一方面,部分方法优化的目标与真实下游需求存在偏离,另一方面,搜索器与生成器间的耦合也影响了泛化与部署效率。
来自主题: AI技术研报
9290 点击 2025-06-17 09:46