AI无师自通,搞定所有家务!π0.5突破泛化极限,UC伯克利系出品
AI无师自通,搞定所有家务!π0.5突破泛化极限,UC伯克利系出品具身智能最大的挑战在于泛化能力,即在陌生环境中正确完成任务。最近,Physical Intelligence推出全新的π0.5 VLA模型,通过异构任务协同训练实现了泛化,各种家务都能拿捏。
来自主题: AI技术研报
9854 点击 2025-05-06 14:29
 搜索
搜索
具身智能最大的挑战在于泛化能力,即在陌生环境中正确完成任务。最近,Physical Intelligence推出全新的π0.5 VLA模型,通过异构任务协同训练实现了泛化,各种家务都能拿捏。
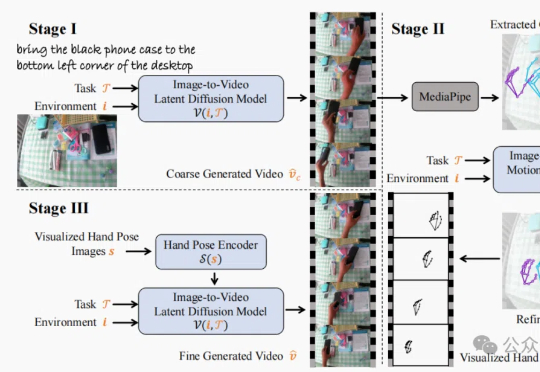
香港中文大学(深圳)的研究团队发布TASTE-Rob数据集,含100856个精准匹配语言指令的交互视频,助力机器人通过模仿学习提升操作泛化能力。团队还开发三阶段视频生成流程,优化手部姿态,显著提升视频真实感和机器人操作准确度。
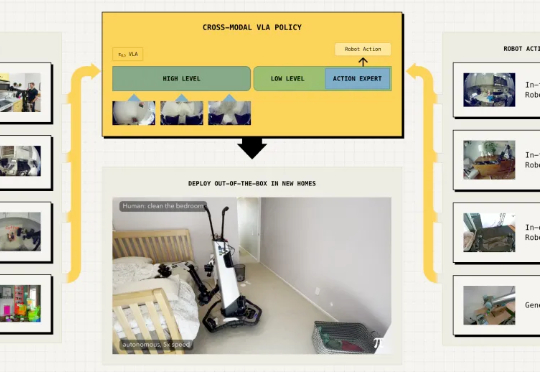
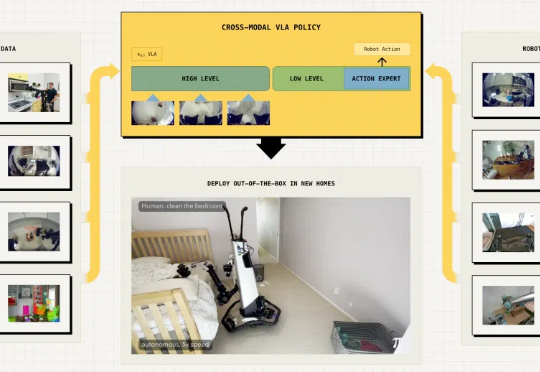
今天,美国具身智能公司 Physical Intelligence 推出了一个基于 π0 的视觉-语言-动作(VLA)模型 π0.5,其利用异构任务的协同训练来实现广泛的泛化,可以在全新的家中执行各种任务。
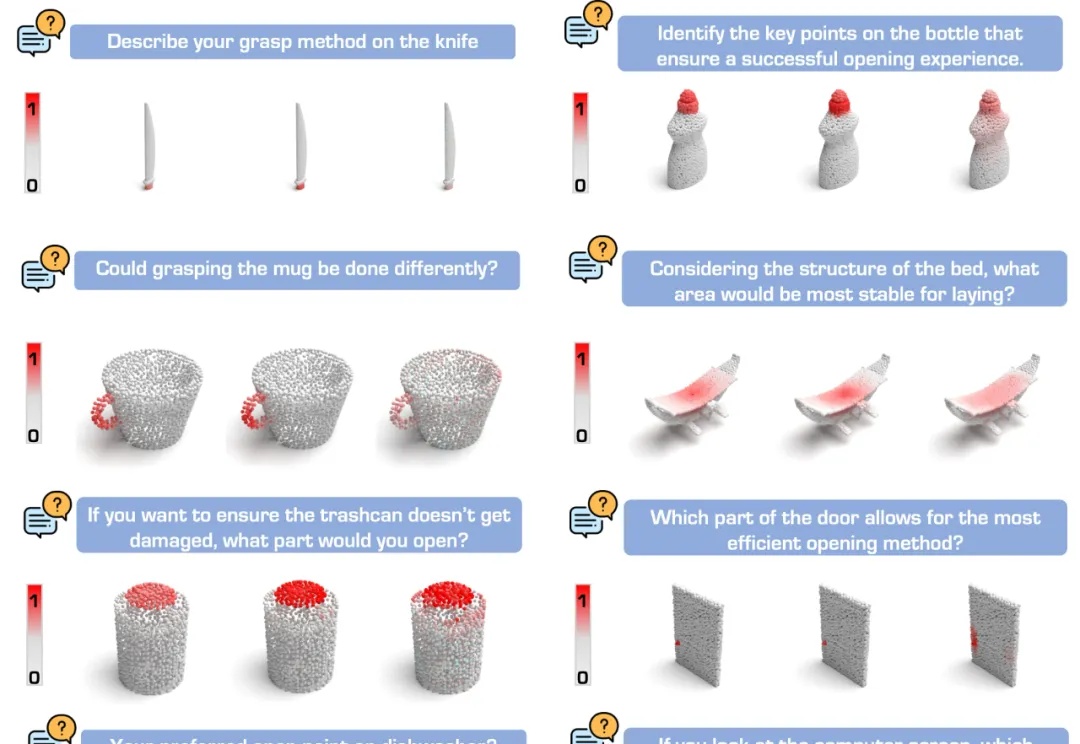
在现实世界中,如何让智能体理解并挖掘 3D 场景中可交互的部位(Affordance)对于机器人操作与人机交互至关重要。所谓 3D Affordance Learning,就是希望模型能够根据视觉和语言线索,自动推理出物体可供哪些操作、以及可交互区域的空间位置,从而为机器人或人工智能系统提供对物体潜在操作方式的理解。

本文介绍了 FoundationStereo,一种用于立体深度估计的基础模型,旨在实现强大的零样本泛化能力。
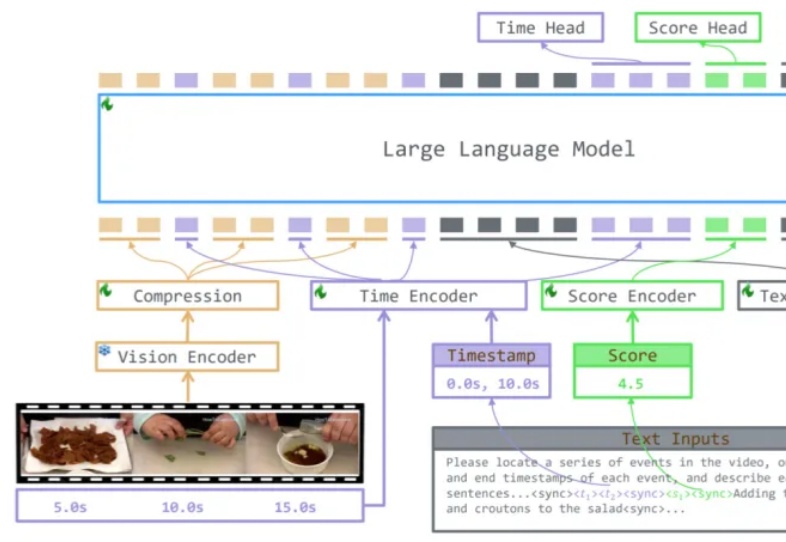
下班回家后你正深陷于一部两小时的综艺节目中,渴望找到那些让人捧腹的爆笑片段,却如同大海捞针。或者,在紧张刺激的足球赛中,你渴望捕捉到那决定性的绝杀瞬间,但传统 AI 视频处理技术效率低下,且模型缺乏泛化能力。为解决这些问题,香港中文大学(深圳)唐晓莹课题组联合腾讯 PCG 发布 TRACE 技术,通过因果事件建模为视频理解大模型提供精准的时间定位能力。

南洋理工大学的研究团队提出了MedRAG模型,通过结合知识图谱推理增强大语言模型(LLM)的诊断能力,显著提升智能健康助手的诊断精度和个性化建议水平。MedRAG在真实临床数据集上表现优于现有模型,准确率提升11.32%,并具备良好的泛化能力,可广泛应用于不同LLM基模型。

Magma是一个新型多模态基础模型,能够理解和执行多模态任务,适用于数字和物理环境:通过标记集合(SoM)和标记轨迹(ToM)技术,将视觉语言数据转化为可操作任务,显著提升了空间智能和任务泛化能力。
由于语言泛化,今天出现了很有趣的现象:「Agent 是什么」,这个问题没有了标准的定义。一个常见的观点是:Agent 是一种让 AI 以类似人的工作和思考方式,来完成一系列的任务。一个 Agent 可以是一个 Bot,也可以是多个 Bot 的协同。

本文提出了一种轨迹级别 SE (3) 等变的扩散策略(ET-SEED),通过将等变表示学习和扩散策略结合,使机器人能够在极少的示范数据下高效学习复杂操作技能,并能够泛化到不同物体姿态和环境中。