
给世界模型加上因果,她要让机器人真正理解“为什么”|对话Aether AI创始人黄碧薇
给世界模型加上因果,她要让机器人真正理解“为什么”|对话Aether AI创始人黄碧薇2011 年,Judea Pearl 凭借在因果推理领域的奠基性贡献获得图灵奖。他提出AI必须跨越三层:关联、干预、反事实。2018 年,他在面向大众的著作《The Book of Why》中将这一框架系统化为“因果之梯”。
来自主题: AI资讯
8177 点击 2026-06-20 14:14
 搜索
搜索
2011 年,Judea Pearl 凭借在因果推理领域的奠基性贡献获得图灵奖。他提出AI必须跨越三层:关联、干预、反事实。2018 年,他在面向大众的著作《The Book of Why》中将这一框架系统化为“因果之梯”。

银河通用团队用史上最大、整整 20 亿帧的动捕数据,训练出了全球首个人形机器人全身实时运控基座大模型,该模型零样本泛化全新动作,成功率从 MLP 架构的 76.89% 跃至 92.58%,推理延迟仅 0.39ms,效果超越英伟达 SONIC,甚至比目前业内主流 TWIST 系统速度提升至五倍。

让人形机器人在移动中完成精细操作,一直是具身智能领域没有被很好解决的问题。
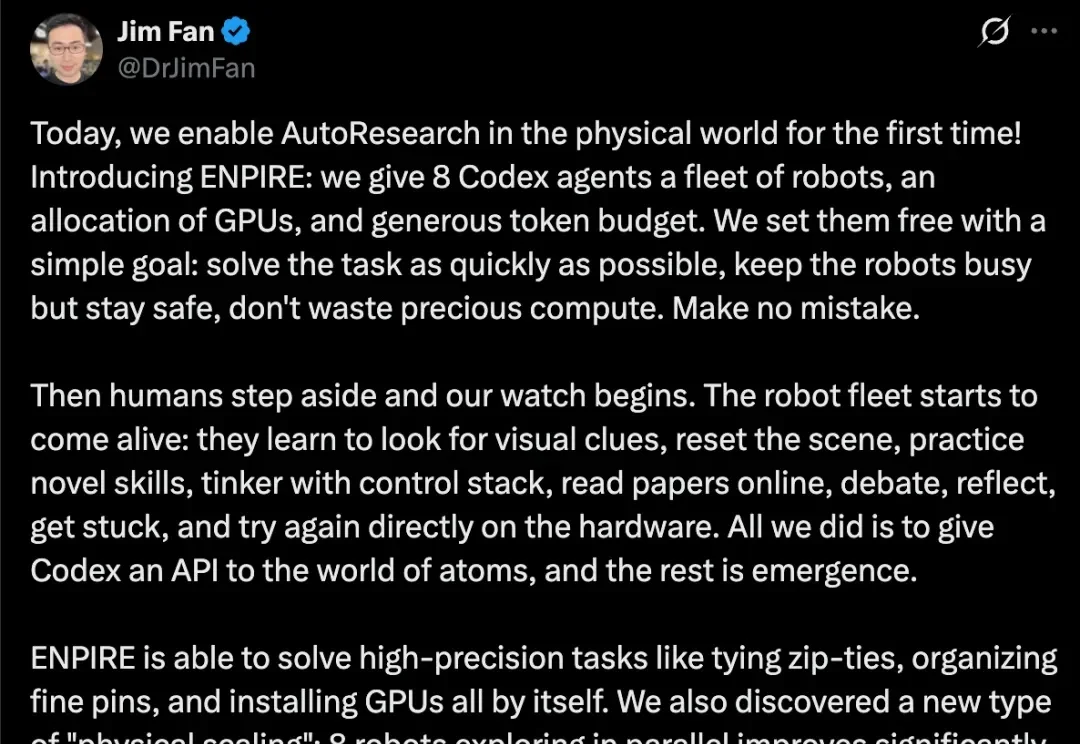
自动化研究,这一次真正走出代码沙盒,进入了真实的物理世界。

傍晚时分,我们走进一栋普通的写字楼。电梯门打开后,走廊和办公室都没有太多异样,直到一束粉色霓虹灯光从房间深处透出来——墙上亮着一行手写体的Somnia Lab,像是某种暧昧的提示,把这里和外面的日常办公秩序轻轻隔开。

模型还不够完美,但机器人必须开始干活。Ferrata 想解决的,正是 Physical AI 从 Demo 走向真实现场之前,最缺的那层安全绳。

KOID是美股首支覆盖具身智能和Physical AI全生态的ETF,持仓50家公司,横跨美国、中国、日本、欧洲市场,目前持有16家中国公司(文末有清单)。KOID不仅押注人形机器人整机厂商,更侧重上游零部件、芯片等核心资产,整体投资思路是复刻“卖铲子”和“卡脖子”逻辑。
6月初,优必选旗下的消费级人形机器人品牌优世界宣布将发布全球首款全尺寸超仿生人形机器人。目前,这款机器人已经开启预售,但还没有公布详细的参数。通过预售界面信息,我们能了解的是,这款超仿生机器人拥有和真人一样的尺寸,其中男款身高183cm、体重42kg,女款身高168cm、体重35.2kg。

新一代具身基础模型G0.5和首款双足人形机器人Kengo亮相不到半个月,星海图又整活儿了。

刚刚过去的2026智源大会上,由智源研究院孵化的星源智发布了全球首个具身交互世界模型ω-EVA,就这一前沿命题给出了全新的差异化解法。传统世界模型的困境是"只预测,不参与"。它们训练时学习未来状态,推理时却与动作生成分割——视频生成得再精美,机器人该撞墙还是撞墙。