
深圳AI硬件特别正常
深圳AI硬件特别正常前一阵见的尽是疯狂bro。做性爱机器人的Somina lab彻底炒作起来了,我看好几个媒体专程去帮bro炒作,还长篇大论宛如写社会学小作文一般分析卧室亲密具身情感陪伴。
来自主题: AI资讯
9112 点击 2026-06-24 10:55
 搜索
搜索
前一阵见的尽是疯狂bro。做性爱机器人的Somina lab彻底炒作起来了,我看好几个媒体专程去帮bro炒作,还长篇大论宛如写社会学小作文一般分析卧室亲密具身情感陪伴。

依赖于有限机器人数据和大量人类数据,也能让 VLA 模型更稳健吗?
刚刚,在维也纳落幕的机器人顶会ICRA 2026上,最佳论文奖(自动化方向)颁给了一支中国团队。
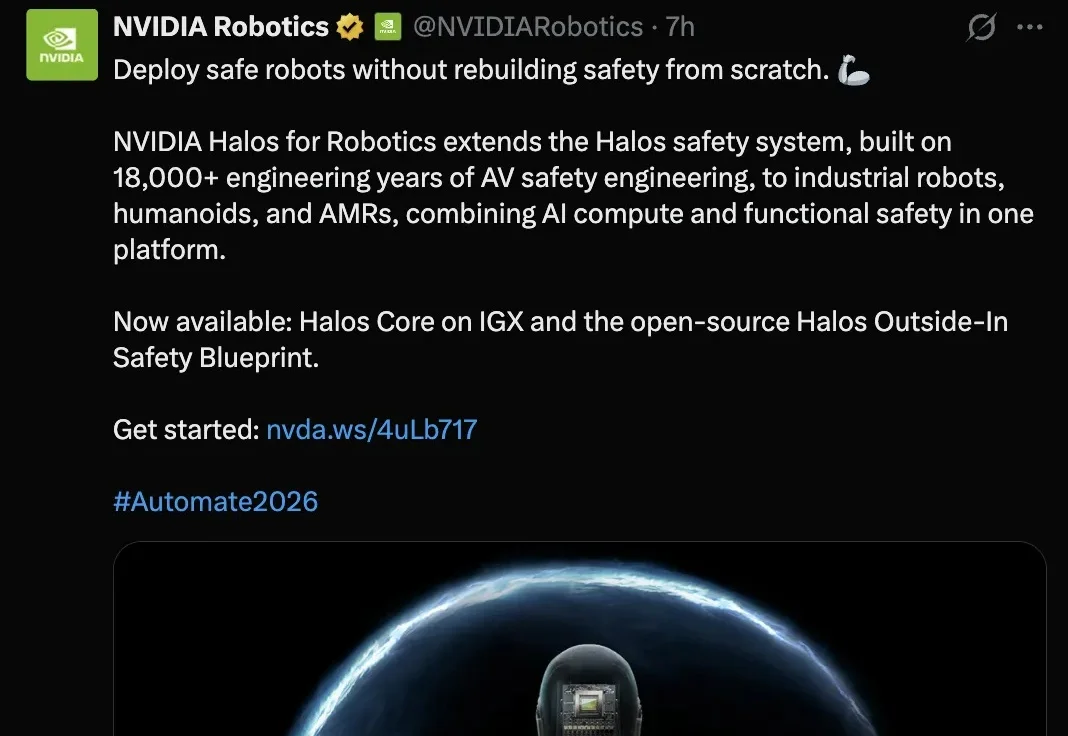
英伟达不造机器人,但要帮具身企业造好机器人(doge)
机器人模型已经能根据“把杯子放进篮子”这类指令完成任务,但用哪只手?

近日,AI-Native科技潮玩品牌ZuzuZoos查无此园宣布完成数千万元Pre-A轮融资,由锦秋基金领投、上海复容投资跟投。这家成立于2025年的初创公司,定位于"AI陪伴机器人+AI潮玩"方向,试图将情感陪伴、AI交互与潮玩IP结合,打造一款会拥抱人的便携式AI伙伴。

机器狗去买咖啡,轮椅跟人抬杠:清华现场0遥操、全靠现挂。完全没有剧本,在清华现场,这群机器人直接把物理AGI第一幕演活了!
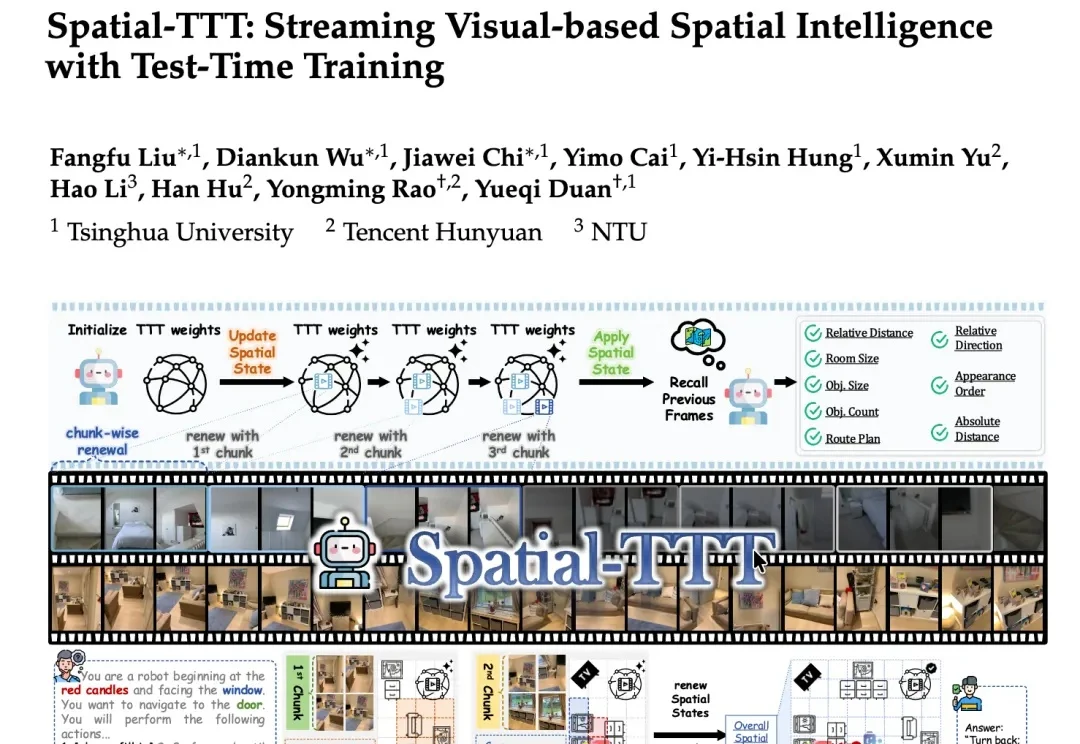
在机器人、自动驾驶、AR等真实场景中,空间理解从来都不是“看一眼图像”就能解决的问题。

具身智能领域的资本,正在涌向机器人的“大脑”。

硬氪获悉,AI厨房机器人品牌「栗上LISSOME」(以下简称“栗上”)近日完成数千万元人民币A轮融资。本轮融资由红杉中国、Brizan Ventures领投,老股东及HKX等机构跟投。此前,栗上已累计获得来自李泽湘教授的清水湾基金、高秉强教授、挑战者资本、高锋耐心资本、XbotPark宁波基地等机构的数千万元融资。