具身智能的Skill时刻!英伟达开源机器人技能库,Jim Fan:范式变了
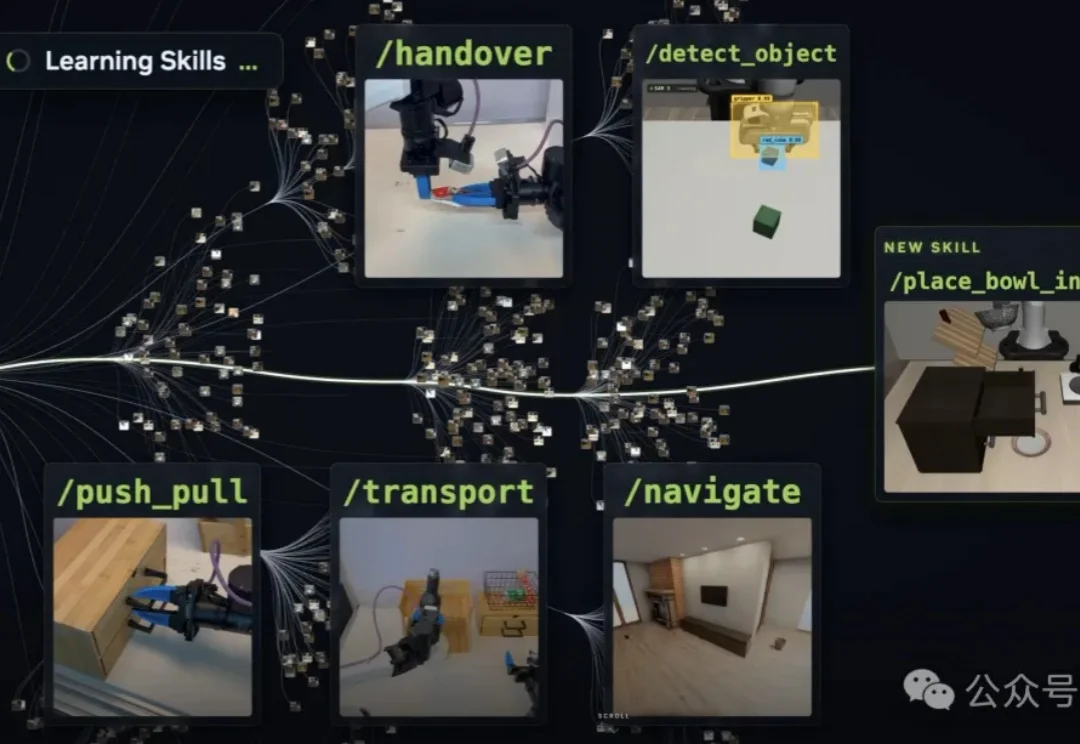
具身智能的Skill时刻!英伟达开源机器人技能库,Jim Fan:范式变了6!机器人也能学Skill了。
来自主题: AI技术研报
6348 点击 2026-07-02 11:06
 搜索
搜索
6!机器人也能学Skill了。

全尺寸、超仿生、成年人限定。
物理AI发展到现在,所有玩家都奔着同一个方向使劲: 让机器人「读懂」所处的物理环境。

我们公司的一个小伙伴,前阵子应聘了一份给机器人打工的工作。
当前,物理 AI 正面临着关于泛化能力的普遍质疑。当模型缺乏对真实物理规律的深度认知、难以跨越复杂多变的开放场景时,如何让机器人真正理解物理世界并精准规划决策,已成为具身智能破局的关键。
小布米OTA V3.0来了。喊一声就跳舞,拖拽胳膊就学会新动作,还能跟你打拳——你的第一个个人机器人,这次真的听话了。

独家获悉,清华系初创公司「厘清智能」宣布完成数亿元种子轮融资,投资方阵容堪称豪华:由顺为资本、红杉中国、高瓴创投、峰瑞资本、星连资本、水木清华校友种子基金、SEE FUND等一线基金,与智元机器人、灵心巧手、世纪金源等产业资本共同投资。其中,顺为资本与红杉中国更是连续多轮追加投资。
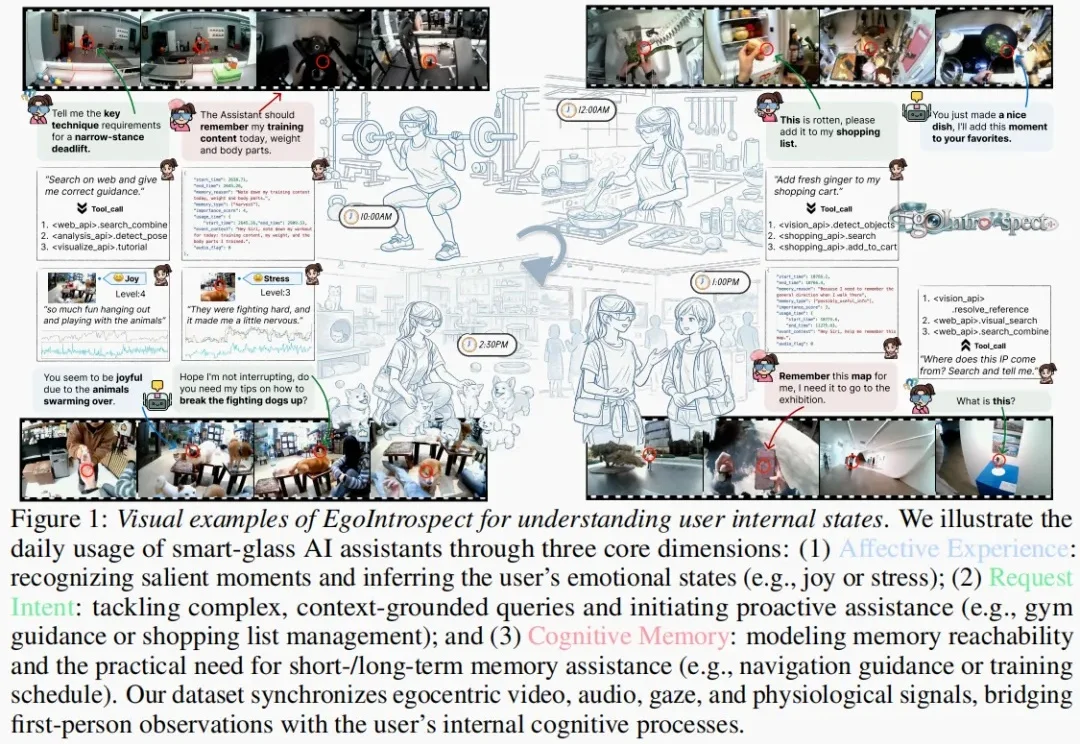
如今,大模型越来越擅长回答问题了,但当 AI 不再只停留在聊天窗口,而是走向智能眼镜、可穿戴设备乃至家庭机器人时,问题会随之改变。用户未必有时间把需求完整说出来,也未必希望助手随时插话。更理想的助手,应该能在现场真正理解人,在用户需要的时候出现,在不合适的时候保持安静。
德塔智能试图为双足人形机器人构建能够理解空间、协调全身并完成真实任务的基础模型。 原生人形机器人基础模型公司德塔智能(Delta Intelligence)近日已连续完成种子+轮、天使轮及天使+轮融资。
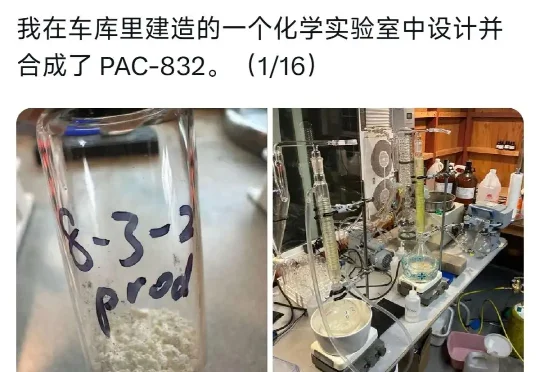
就在今天凌晨,哈佛博士Douglas Yao在X宣布,研发了一款针对阿尔茨海默病的新药PAC-832,引发了数百人的围观。这是世界上第一个选择性GalR1拮抗剂,创始人表示全程使用了机器人自动化技术和AI大模型。