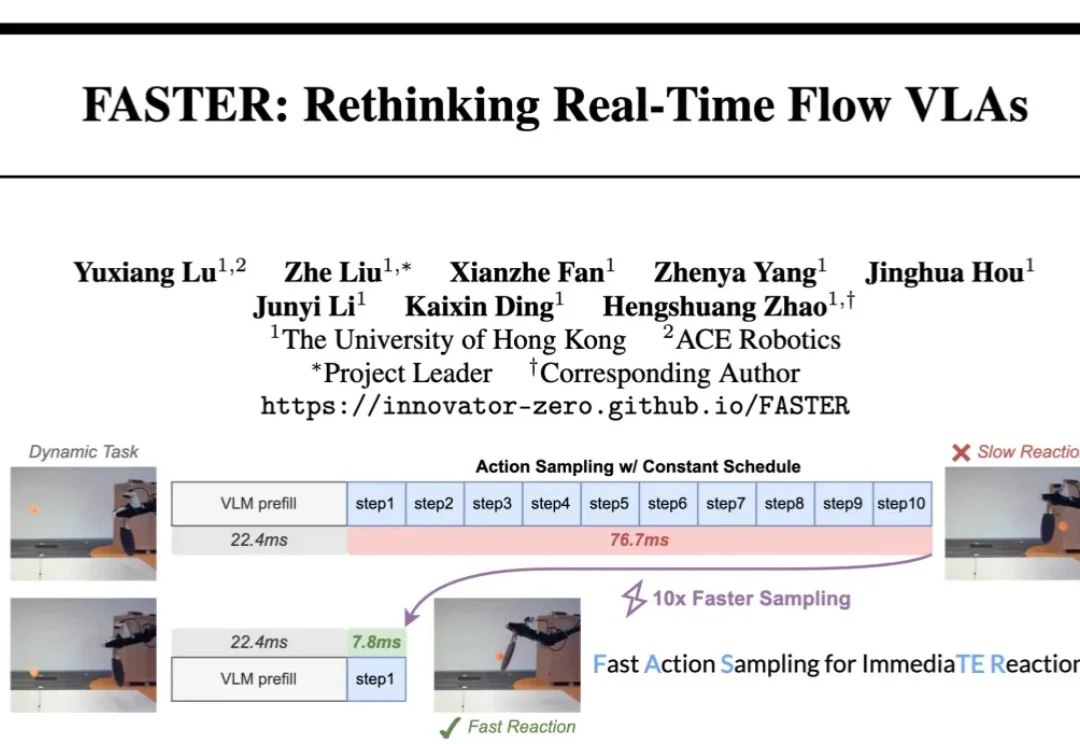
首创TTFA指标!港大团队开源FASTER,让VLA模型真正实现「即刻响应」
首创TTFA指标!港大团队开源FASTER,让VLA模型真正实现「即刻响应」具身智能正以前所未有的速度发展,VLA 模型展现出越来越强的动作和泛化能力。然而,当我们真正把 VLA 模型部署到物理世界时,一个核心挑战浮出水面:实时性。
来自主题: AI技术研报
8313 点击 2026-05-15 09:55
 搜索
搜索
具身智能正以前所未有的速度发展,VLA 模型展现出越来越强的动作和泛化能力。然而,当我们真正把 VLA 模型部署到物理世界时,一个核心挑战浮出水面:实时性。
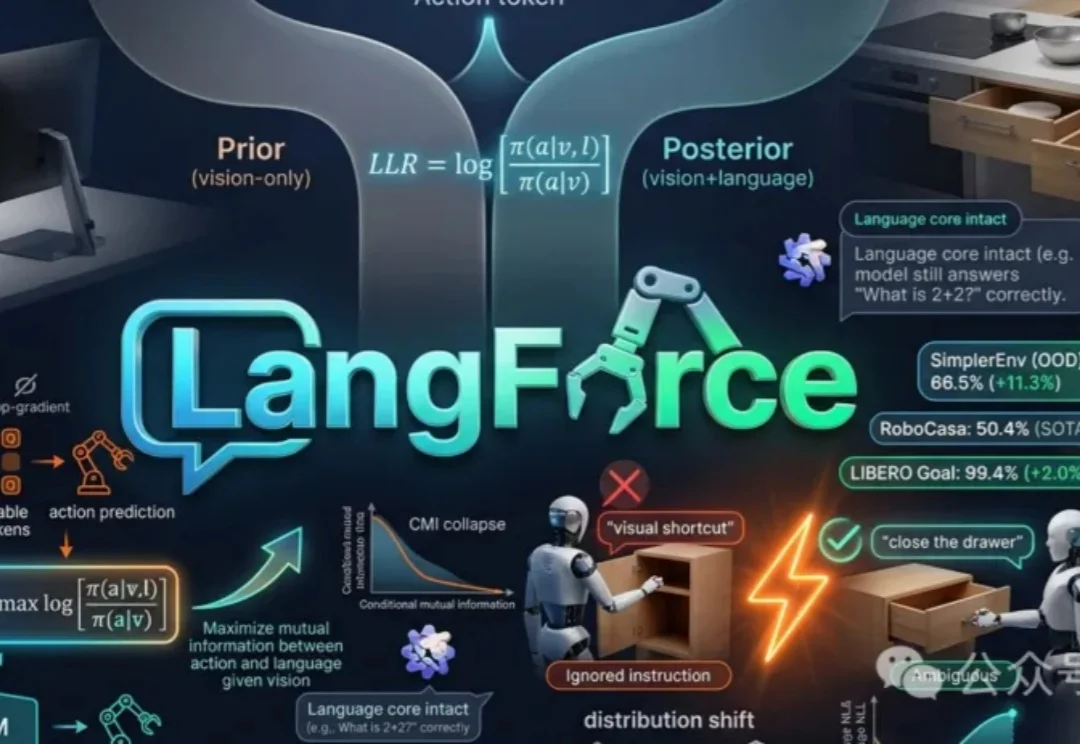
当前VLA模型常依赖视觉线索而非语言指令,导致在新场景下表现不佳。论文提出LangForce方法,通过引入对数似然比损失,强化模型对语言的依赖,提升其在分布外环境中的泛化能力,并保留语言核心功能。
今天凌晨,Physical Intelligence发布了全新的VLA模型π0.7,狠狠敲了世界模型一记闷棍。π0.7第一次在机器人领域证明了Compositional Generalization(组合泛化),且VLA。
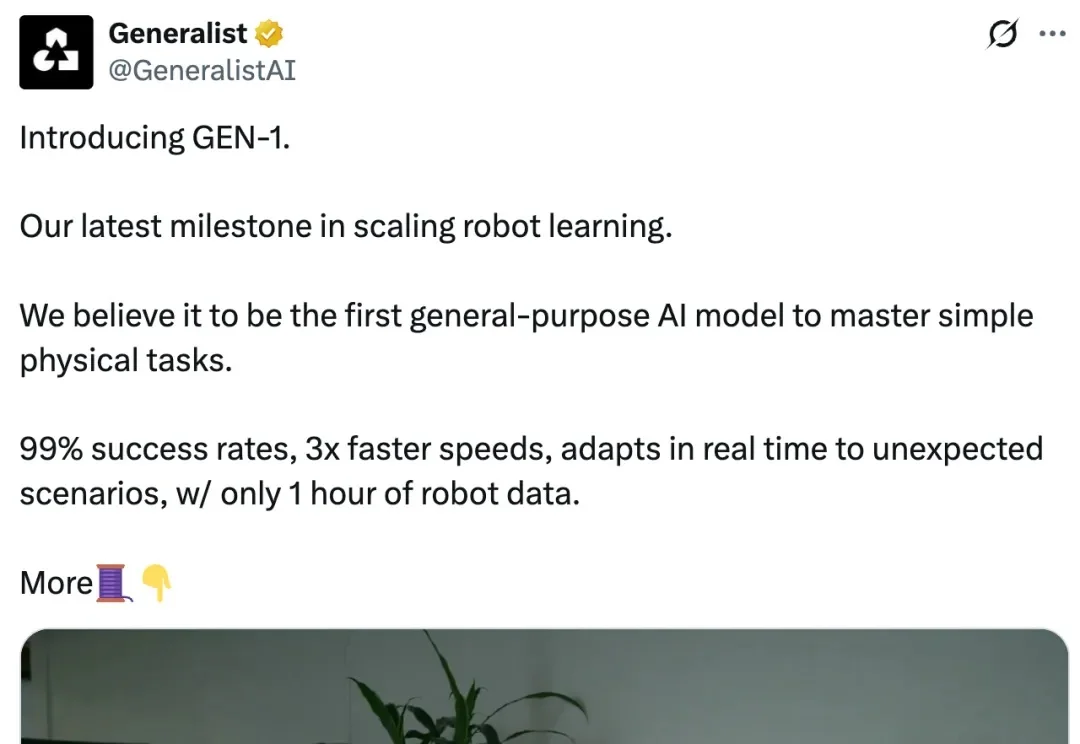
这个月,具身智能领域又卷出新高度:硅谷独角兽公司 Generalist AI 发布全新一代基础模型 GEN-1,将机器人包装手机、折纸箱这些活的平均成功率直接拉到了创纪录的 99%,折纸箱的速度更是飙到了以前的三倍(34s vs 12.1s)。

具身数据层的全球竞赛正在迅速升温。NVIDIA Research在2026年发布EgoScale数据与训练框架,在Ego-centric人类操作视频上训练VLA模型,用 20,854小时带动作标注的第一人称人类视频,观察到数据规模和验证损失之间接近对数线性的scaling law。1X收集人类第一视角及家庭行为数据,通过 Sunday项目采集百万小时级家庭场景视频。
LaST₀团队 投稿 量子位 | 公众号 QbitAI 近日,至简动力、北京大学、香港中文大学、北京人形机器人创新中心提出了一种名为LaST₀的全新隐空间推理VLA模型,在基于Transformer混
对于电子产品,我们已然习惯了「出厂即巅峰」的设定:开箱的那一刻往往就是性能的顶点,随后的每一天都在折旧。
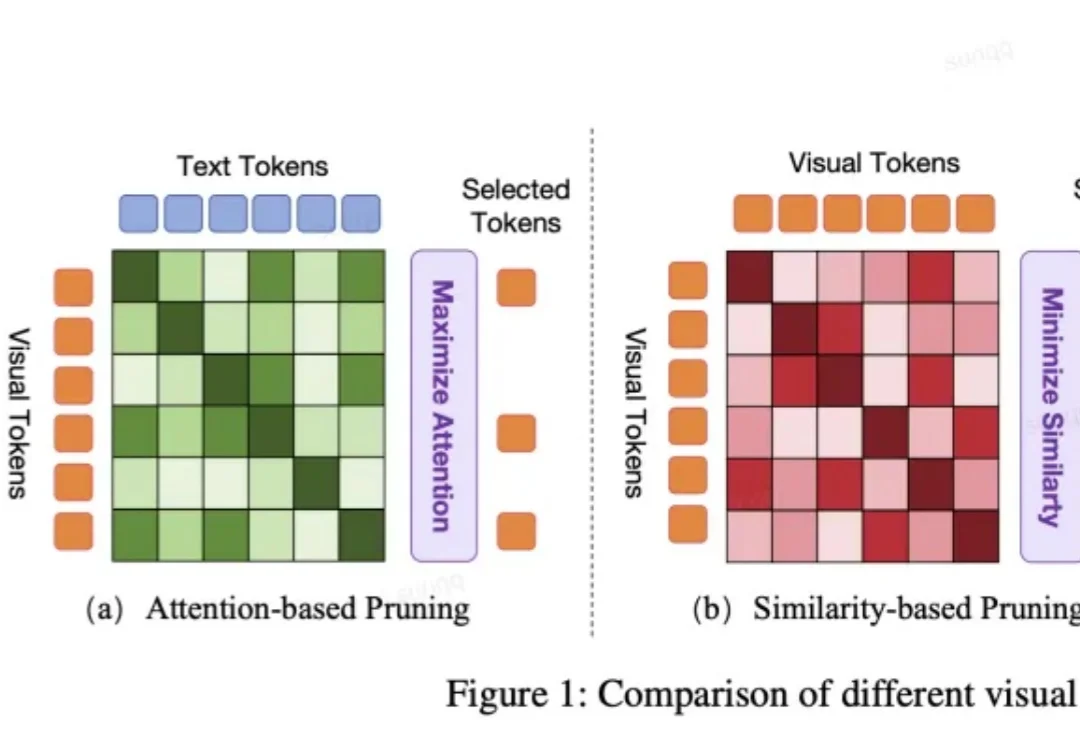
VLA 模型正被越来越多地应用于端到端自动驾驶系统中。然而,VLA 模型中冗长的视觉 token 极大地增加了计算成本。但现有的视觉 token 剪枝方法都不是专为自动驾驶设计的,在自动驾驶场景中都具有局限性。

VLA模型性能暴涨300%,背后训练数据还首次实现90%由世界模型生成。
具身智能的「ChatGPT时刻」还没到,机器人的「幻觉」却先来了?在需要几十步操作的长序列任务中,现有的VLA模型经常「假装在干活」,误以为任务完成。针对这一痛点,北京大学团队提出自进化VLA框架EvoVLA。该模型利用Gemini生成「硬负样本」进行对比学习,配合几何探索与长程记忆,在复杂任务基准Discoverse-L上将成功率提升了10.2%,并将幻觉率从38.5%大幅降至14.8%。