
Meta用40万个GPU小时做了一个实验,只为弄清强化学习Scaling Law
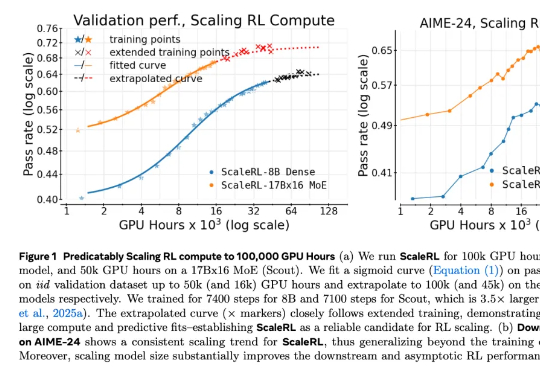
Meta用40万个GPU小时做了一个实验,只为弄清强化学习Scaling Law在 LLM 领域,扩大强化学习算力规模正在成为一个关键的研究范式。但要想弄清楚 RL 的 Scaling Law 具体是什么样子,还有几个关键问题悬而未决:如何 scale?scale 什么是有价值的?RL 真的能如预期般 scale 吗?
来自主题: AI技术研报
9666 点击 2025-10-19 17:54
在 LLM 领域,扩大强化学习算力规模正在成为一个关键的研究范式。但要想弄清楚 RL 的 Scaling Law 具体是什么样子,还有几个关键问题悬而未决:如何 scale?scale 什么是有价值的?RL 真的能如预期般 scale 吗?
从ChatGPT到DeepSeek,强化学习(Reinforcement Learning, RL)已成为大语言模型(LLM)后训练的关键一环。
目前,所有主流 LLM 都有一个固定的上下文窗口(如 200k, 1M tokens)。一旦输入超过这个限制,模型就无法处理。 即使在窗口内,当上下文变得非常长时,模型的性能也会急剧下降,这种现象被称为「上下文腐烂」(Context Rot):模型会「忘记」开头的信息,或者整体推理能力下降。

大模型强化学习总是「用力过猛」?Scale AI联合UCLA、芝加哥大学的研究团队提出了一种基于评分准则(rubric)的奖励建模新方法,从理论和实验两个维度证明:要想让大模型对齐效果好,关键在于准确区分「优秀」和「卓越」的回答。这项研究不仅揭示了奖励过度优化的根源,还提供了实用的解决方案。
当强化学习(RL)成为大模型后训练的核心工具,「带可验证奖励的强化学习(RLVR)」凭借客观的二元反馈(如解题对错),迅速成为提升推理能力的主流范式。从数学解题到代码生成,RLVR 本应推动模型突破「已知答案采样」的局限,真正掌握深度推理逻辑 —— 但现实是,以 GRPO 为代表的主流方法正陷入「均值优化陷阱」。
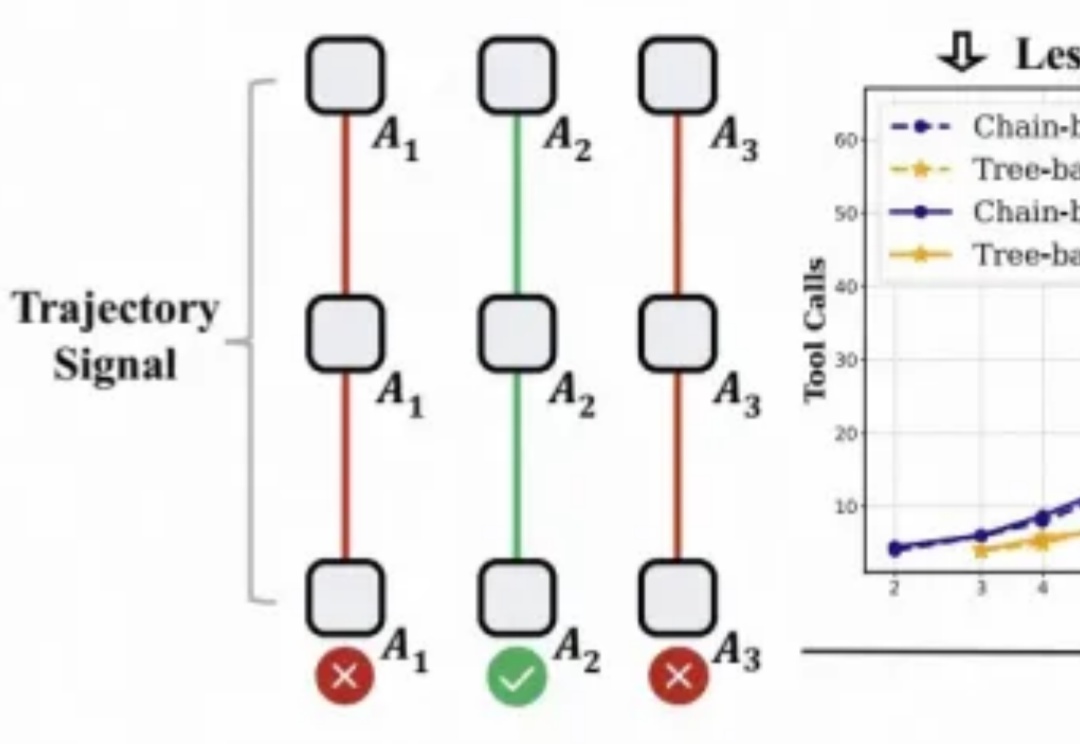
对于大模型的强化学习已在数学推理、代码生成等静态任务中展现出不俗实力,而在需要与开放世界交互的智能体任务中,仍面临「两朵乌云」:高昂的 Rollout 预算(成千上万的 Token 与高成本的工具调用)和极其稀疏的「只看结果」的奖励信号。
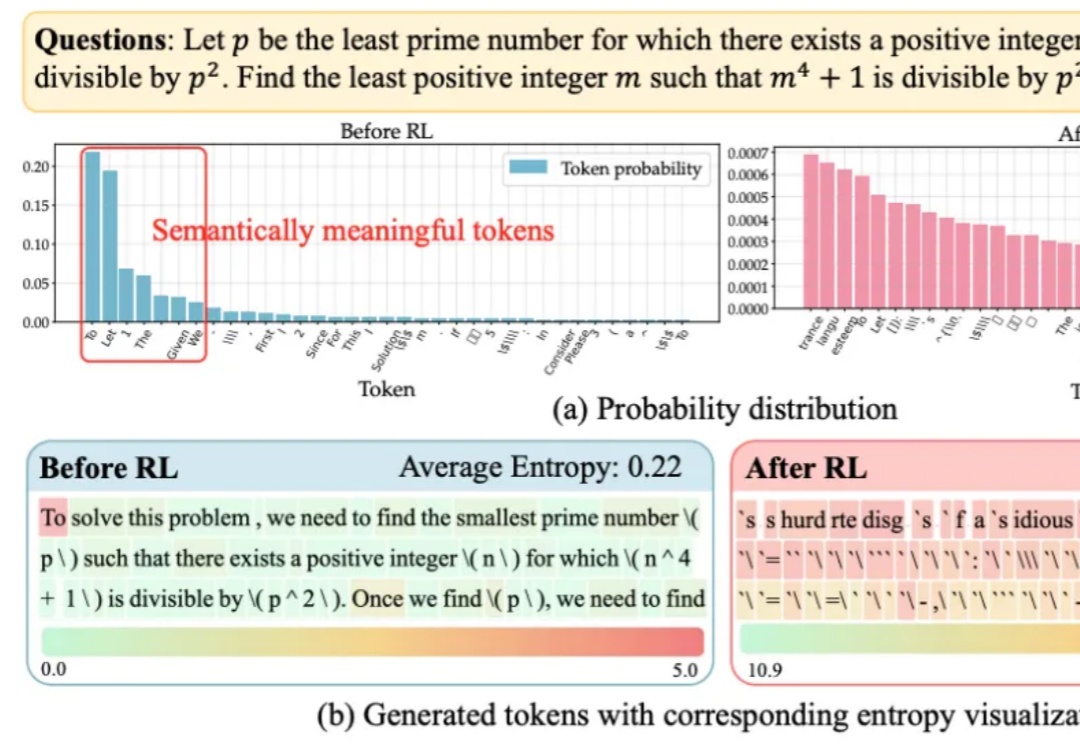
大语言模型在RLVR训练中面临的“熵困境”,有解了!

灵巧手技能+1,能帮女友拧瓶盖了!
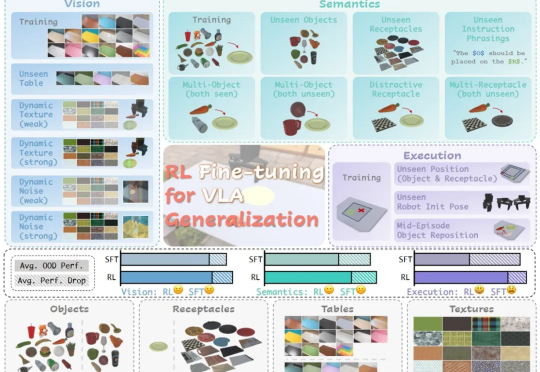
在具身智能领域,视觉 - 语言 - 动作(VLA)大模型正展现出巨大潜力,但仍面临一个关键挑战:当前主流的有监督微调(SFT)训练方式,往往让模型在遇到新环境或任务时容易出错,难以真正做到类人般的泛化
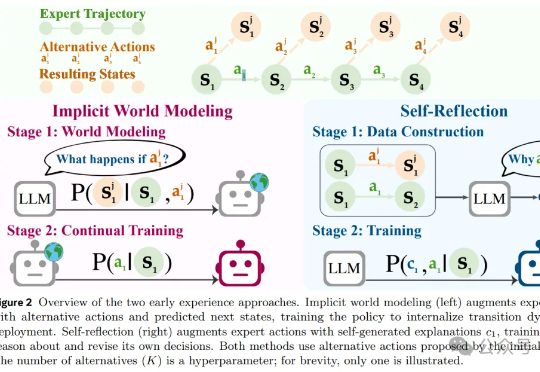
风雨飘摇中的Meta,于昨天发布了一篇重量级论文,提出了一种被称作「早期经验」(Early Experience)的全新范式,让AI智能体「无师自通」,为突破强化学习瓶颈提供了一种新思路。