让机器人学会手往哪儿伸、怎么操作,东大团队给了新解法
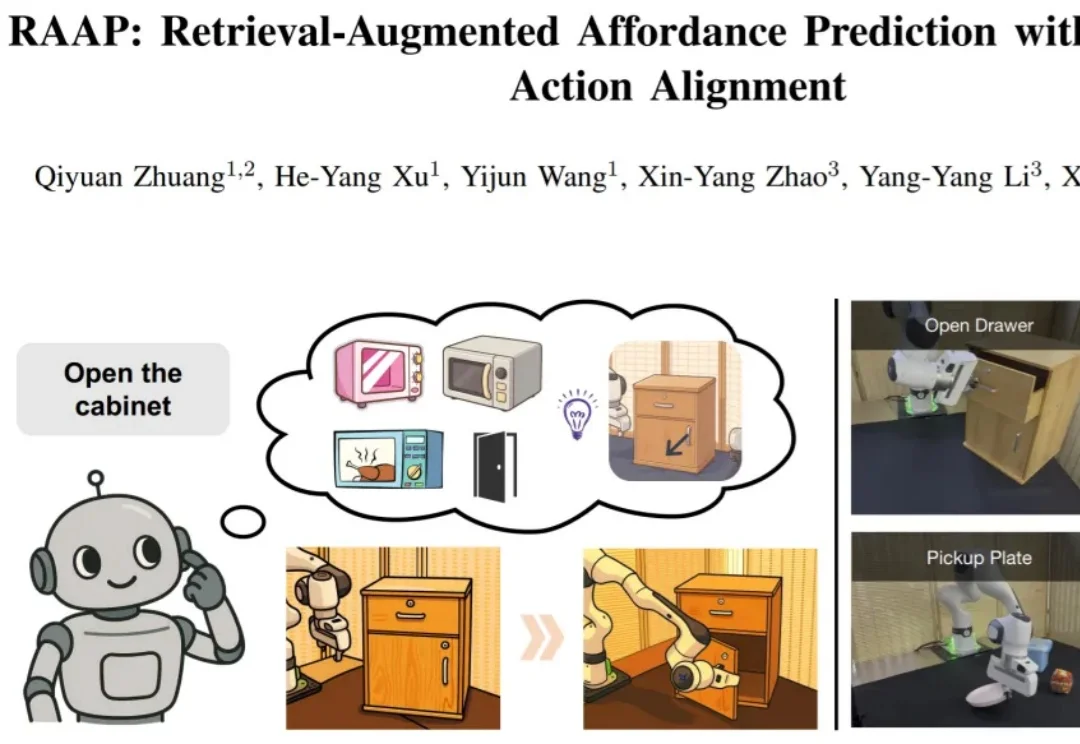
让机器人学会手往哪儿伸、怎么操作,东大团队给了新解法在具身智能领域,可供性(affordance)预测 —— 即让机器人从视觉观测中理解 "在哪里操作"(接触点)与 "如何操作"(动作方向)—— 是实现精细化机器人操作的基础之一。精细操作要求机器人不仅能定位到物体的可交互区域,更要掌握接触后的准确运动方向,例如判断抽屉把手的精确拉动方向完成开合。
来自主题: AI技术研报
9305 点击 2026-04-09 09:47
 搜索
搜索
在具身智能领域,可供性(affordance)预测 —— 即让机器人从视觉观测中理解 "在哪里操作"(接触点)与 "如何操作"(动作方向)—— 是实现精细化机器人操作的基础之一。精细操作要求机器人不仅能定位到物体的可交互区域,更要掌握接触后的准确运动方向,例如判断抽屉把手的精确拉动方向完成开合。