直接从像素到单词:这个原生大模型统一单图、多图、视频和空间智能
直接从像素到单词:这个原生大模型统一单图、多图、视频和空间智能今天几乎所有主流视觉语言模型(VLM)—— 无论是 Qwen-VL、InternVL,还是 LLaVA 系列 —— 都遵循着同一套经典架构:先用预训练视觉编码器(如 CLIP、SigLIP)将图像压缩为特征,再通过投影层把这些特征送入大语言模型。
来自主题: AI技术研报
7496 点击 2026-06-24 16:06
 搜索
搜索
今天几乎所有主流视觉语言模型(VLM)—— 无论是 Qwen-VL、InternVL,还是 LLaVA 系列 —— 都遵循着同一套经典架构:先用预训练视觉编码器(如 CLIP、SigLIP)将图像压缩为特征,再通过投影层把这些特征送入大语言模型。
在机器人、自动驾驶、AR等真实场景中,空间理解从来都不是“看一眼图像”就能解决的问题。

如今,CameraSquad 的出现,让这种多视角一致的视频生成与 3D 世界状态构建成为现实。近日,中国科学院大学高林研究员团队联合卡迪夫大学、香港科技大学和快手可灵团队,提出了一种面向多轨迹并行生成的相机可控视频生成方法 CameraSquad [1],相关论文已被 ACM SIGGRAPH 2026 录用。
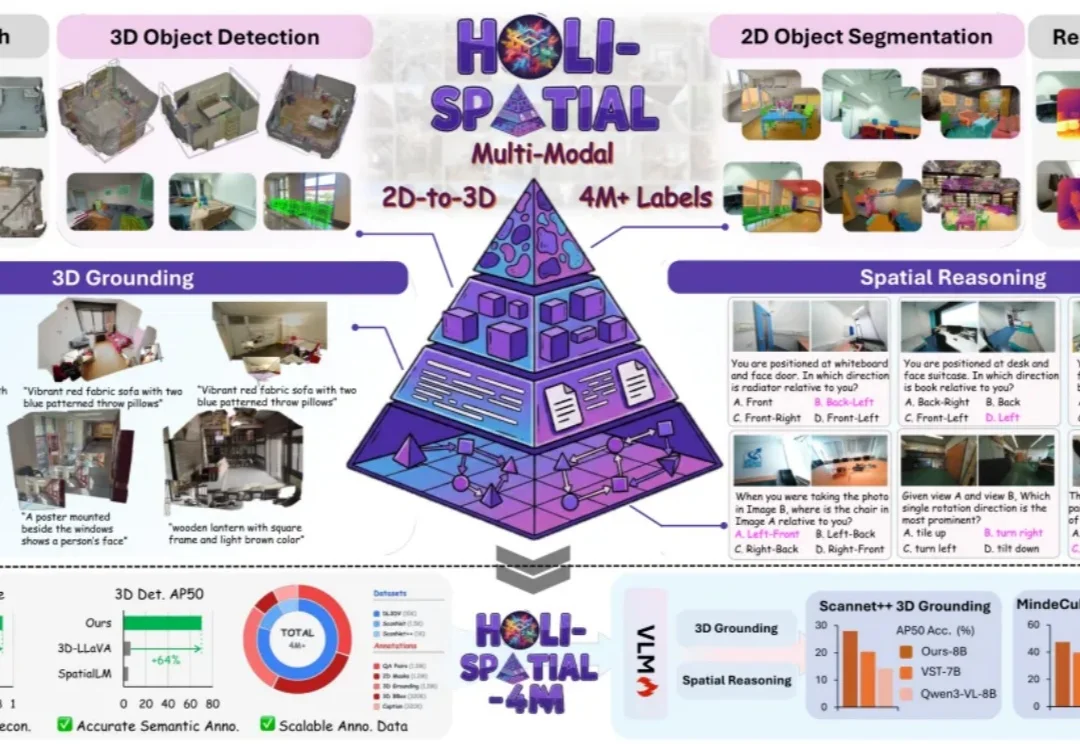
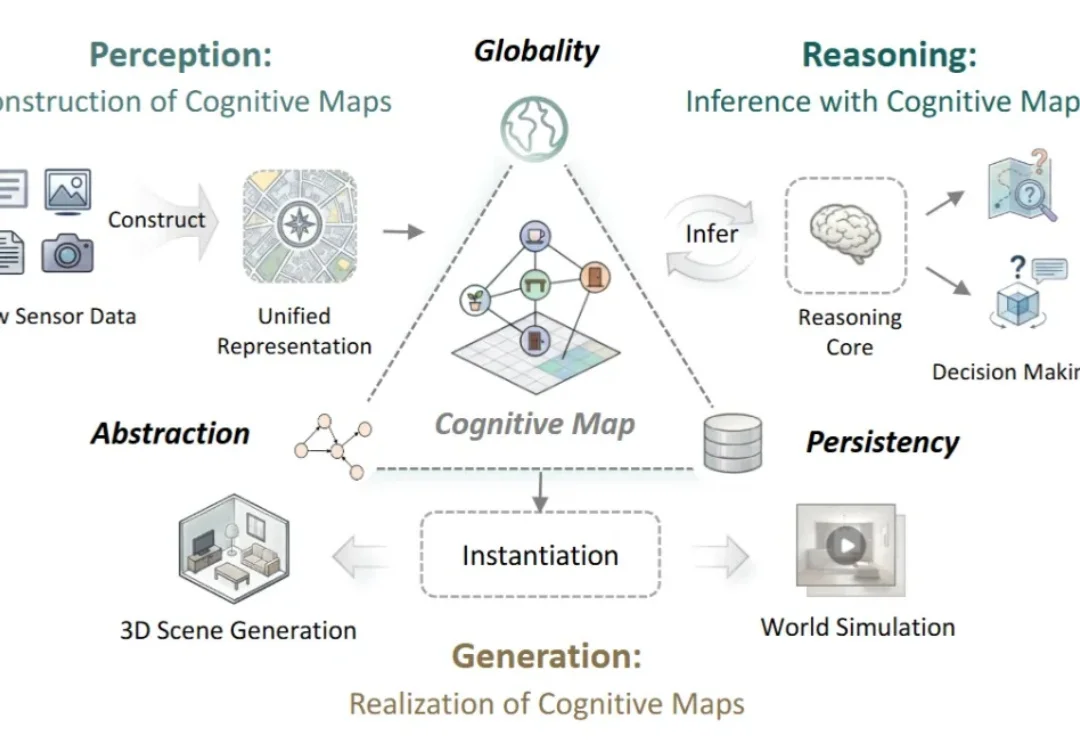
从原始视频出发,无需人工介入,自动生成 3D 重建、深度、2D mask、3D 框、实例描述、3D grounding 和空间问答。Holi-Spatial 试图把「空间智能」的数据生产,推进到自动化、可扩展的新阶段。
大模型已经能流畅对话、看图识物,但一个更底层的问题始终没被真正解决——它们是否「理解」了我们所处的三维世界?
今天,由李飞飞联合创立的空间智能公司 World Labs 在同一天发布了三篇技术论文!三篇论文分别由公司内部实习生主导完成,研究方向各异,但共享同一个核心命题:借助已在海量图片数据上训练成熟的 2D 生成模型,降低 3D 内容生成的难度门槛。
AI 已经能看懂图像、生成场景,甚至在虚拟环境中规划行动。
空间智能与世界模型初创公司知天下(苏州)人工智能科技有限公司(以下简称“知天下”)近日已完成天使轮融资。知天下是一家专注于高斯泼溅(3D Gaussian Splatting,简称3DGS)三维重建与生成技术的AI企业,于 2024 年初推出 3DGS 免费重建与发布服务
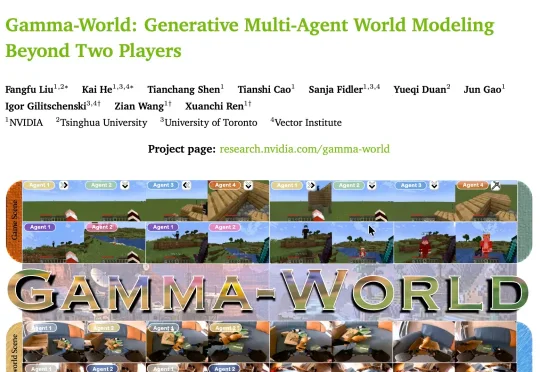
5 月下旬,NVIDIA 联合清华大学、多伦多大学和 Vector Institute 发布 Gamma-World,共一第一为清华大学电子系博士刘芳甫,核心 Research 方向是世界模型和空间智能。

竹马创新宣布完成天使+轮融资,其由商汤国香资本领投,鼎晖VGC、峰瑞资本跟投。竹马创新是一家以Camera + AI为核心方向的空间智能公司,刚在4月完成数千万元天使轮融资,仅仅约30天,其估值增长已翻倍。