
人会逆向思维,LLM也可以?DeepMind研究表明还能提升推理能力
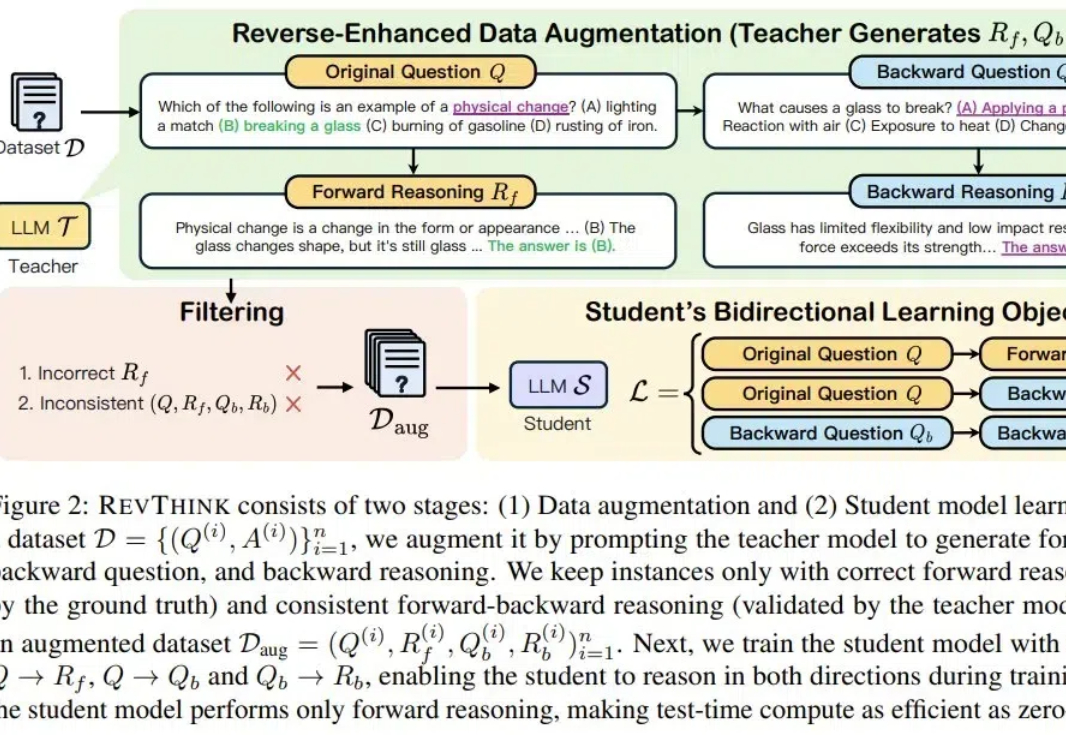
人会逆向思维,LLM也可以?DeepMind研究表明还能提升推理能力人能逆向思维,LLM 也可以吗?北卡罗来纳大学教堂山分校与谷歌最近的一项研究表明,LLM 确实可以,并且逆向思维还能帮助提升 LLM 的正向推理能力!
来自主题: AI技术研报
6952 点击 2024-12-21 11:17
人能逆向思维,LLM 也可以吗?北卡罗来纳大学教堂山分校与谷歌最近的一项研究表明,LLM 确实可以,并且逆向思维还能帮助提升 LLM 的正向推理能力!
如今,多模态大模型(MLLM)已经在视觉理解领域取得了长足进步,其中视觉指令调整方法已被广泛应用。该方法是具有数据和计算效率方面的优势,其有效性表明大语言模型(LLM)拥有了大量固有的视觉知识,使得它们能够在指令调整过程中有效地学习和发展视觉理解。
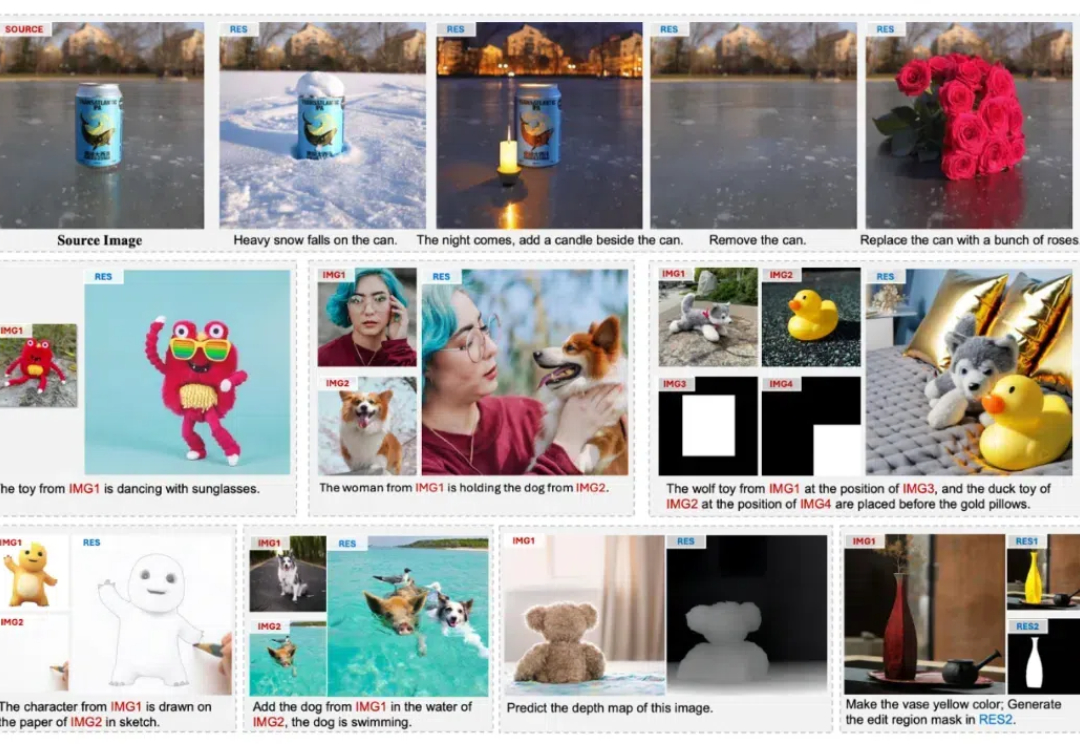
本文中,香港大学与 Adobe 联合提出名为 UniReal 的全新图像编辑与生成范式。该方法将多种图像任务统一到视频生成框架中,通过将不同类别和数量的输入/输出图像建模为视频帧,从大规模真实视频数据中学习属性、姿态、光照等多种变化规律,从而实现高保真的生成效果。
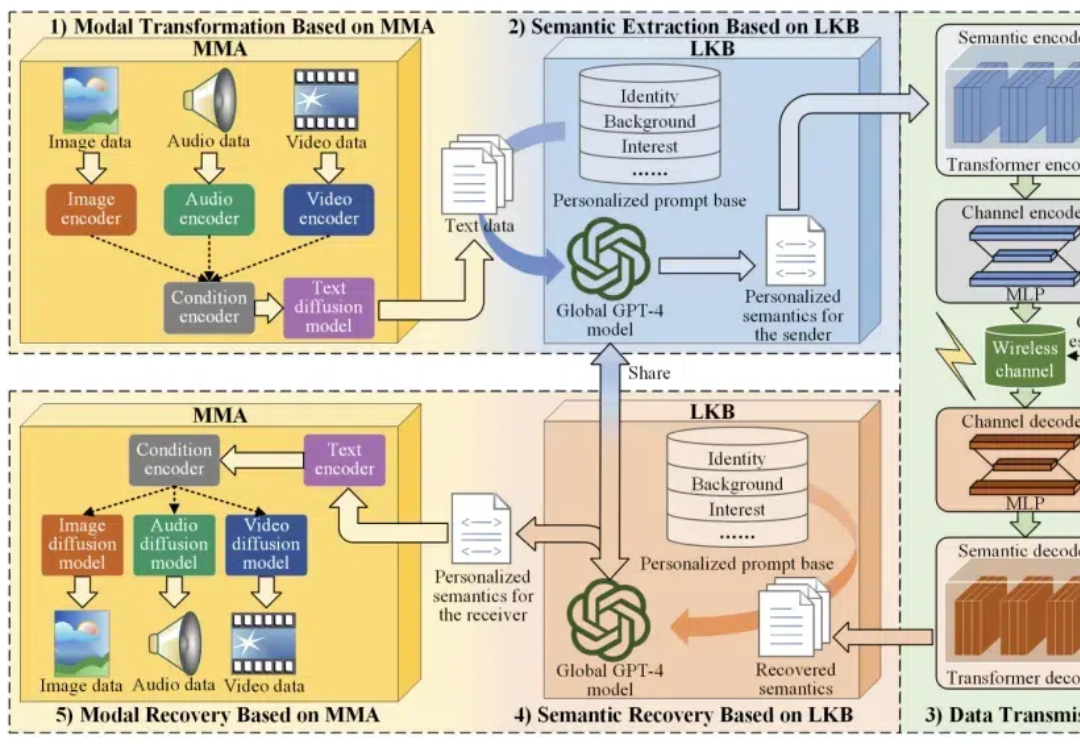
多模态信号,包括文本、音频、图像和视频等,可以被整合到语义通信中,在语义层面提供低延迟、高质量的沉浸式体验。
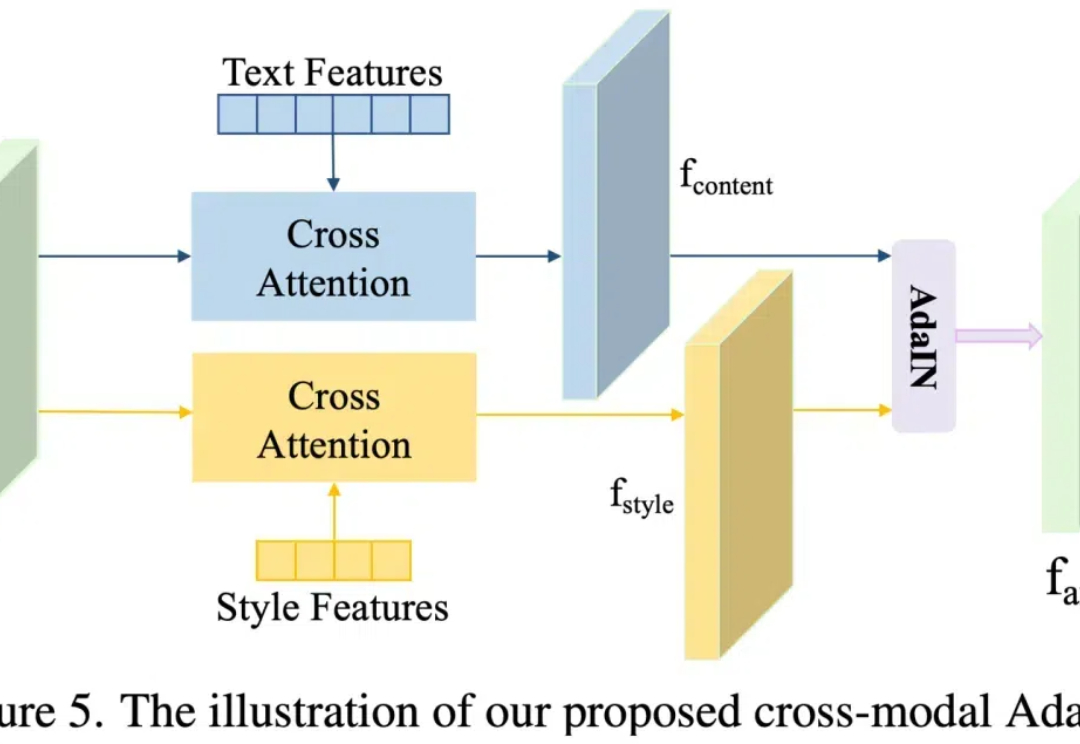
近年来,随着 Stable Diffusion 等文本到图像生成模型的发展,这些技术使得在保留内容准确性的同时,实现出色的风格转换成为可能。这项技术在数字绘画、广告和游戏设计等领域具有重要的应用价值。

面对AI圈疯传的「数据如化石燃料一般正在枯竭」,我们该如何从海量数据中掘金?AI炼出的数据飞轮2.0,或许就是答案。
要让大模型适应各不一样的下游任务,微调必不可少。常规的中心化微调过程需要模型和数据存在于同一位置 —— 要么需要数据所有者上传数据(这会威胁到数据所有者的数据隐私),要么模型所有者需要共享模型权重(这又可能泄露自己花费大量资源训练的模型)。
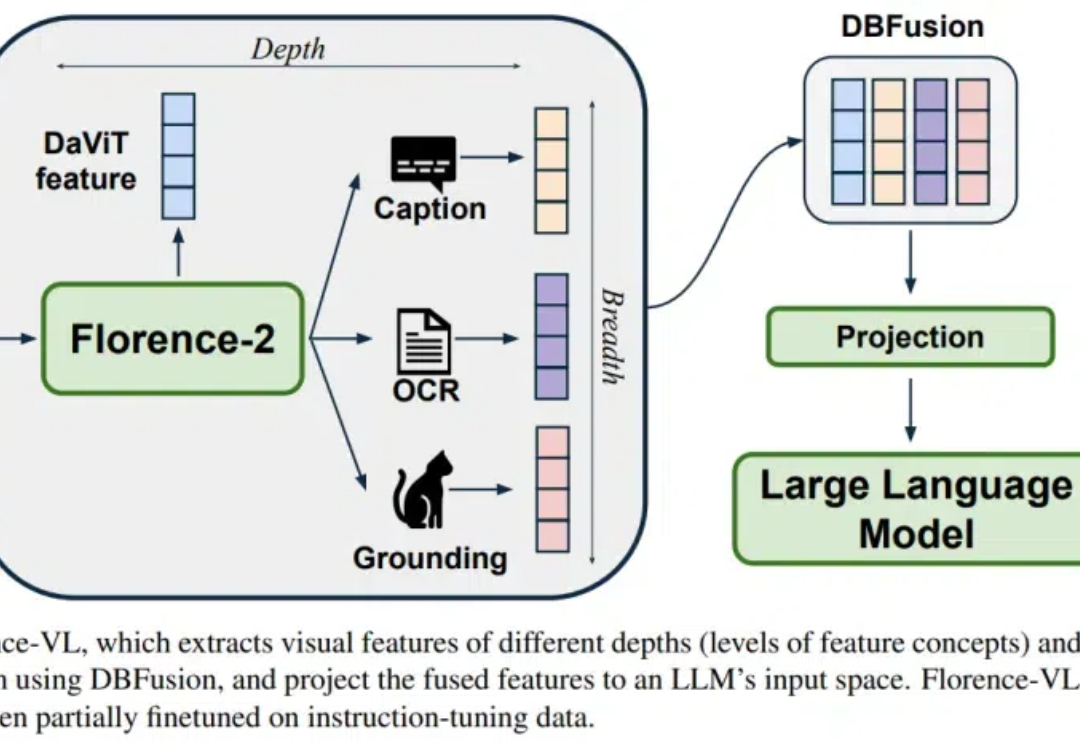
Florence-VL 提出了使用生成式视觉编码器 Florence-2 作为多模态模型的视觉信息输入,克服了传统视觉编码器(如 CLIP)仅提供单一视觉表征而往往忽略图片中关键的局部信息。
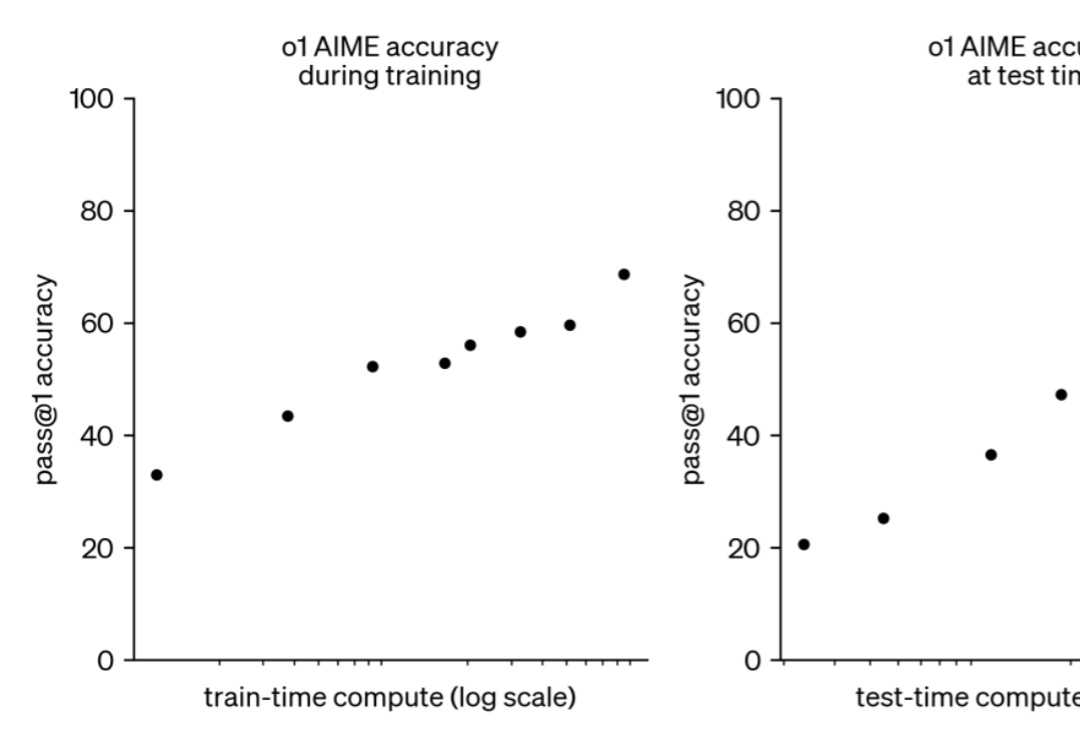
如果给小模型更长的思考时间,它们性能可以超越更大规模的模型。

现如今,以 GPT 为代表的大语言模型正深刻影响人们的生产与生活,但在处理很多专业性和复杂程度较高的问题时仍然面临挑战。在诸如药物发现、自动驾驶等复杂场景中,AI 的自主决策能力是解决问题的关键,而如何进行决策大模型的高效训练目前仍然是开放性的难题。