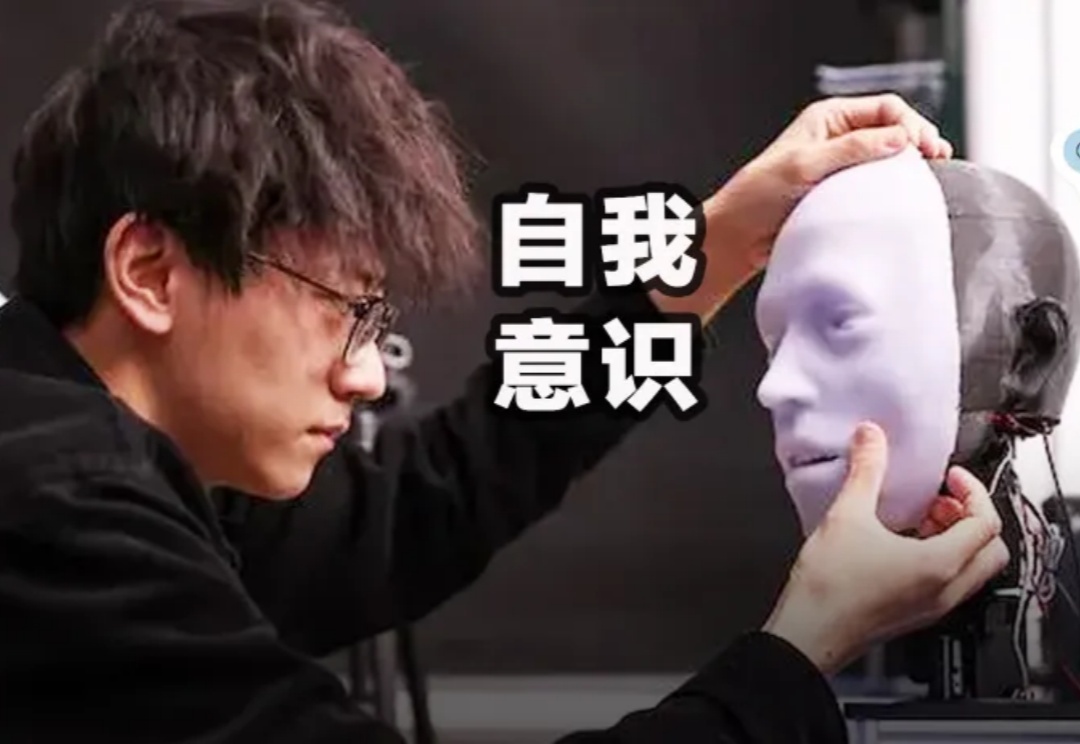
机器人诞生「运动自我意识」,哥大华人登Nature子刊:照镜子学会自我建模
机器人诞生「运动自我意识」,哥大华人登Nature子刊:照镜子学会自我建模近日,来自哥大的研究人员开发出了一种新AI系统,让机器人通过普通摄像头和深度神经网络实现自我建模、运动规划和自我修复,突破了传统机器人依赖工程师调整的局限,使机器人能像人类一样自主学习和适应环境变化,为具身智能发展带来新范式。
来自主题: AI技术研报
10430 点击 2025-02-28 15:32
 搜索
搜索
近日,来自哥大的研究人员开发出了一种新AI系统,让机器人通过普通摄像头和深度神经网络实现自我建模、运动规划和自我修复,突破了传统机器人依赖工程师调整的局限,使机器人能像人类一样自主学习和适应环境变化,为具身智能发展带来新范式。
百万真机数据集开源项目AgiBot World,也是全球首个基于全域真实场景、全能硬件平台、全程质量把控的大规模机器人数据集。 该项目由稚晖君具身智能创业项目智元机器人,携手上海AI Lab、国家地方共建人形机器人创新中心以及上海库帕思联合发布。

图形学的并行计算和边际计算,在模拟物理世界和机器人训练中起到了关键作用。
最近,Jim Fan参与的一项研究推出了自动化数据生成系统DexMimicGen。该系统可基于少量人类演示,合成类人机器人的灵巧手运动轨迹,解决了训练数据集的获取难题,而且还提升了实验中机器人的表现。

人类只需要演示五次,就能让机器人学会一项复杂技能。英伟达实验室,提出了机器人训练数据缺乏问题的新解决方案——DexMimicGen。
把平均成功率从 50% 拉到了 100%。
在用模拟环境训练机器人时,所用的数据与真实世界存在着巨大的差异。为此,李飞飞团队提出「数字表亲」,这种虚拟资产既具备数字孪生的优势,还能补足泛化能力的不足,并大大降低了成本。
不百分百还原出虚拟场景,效果反而更好。

这是机器人界的 Llama?
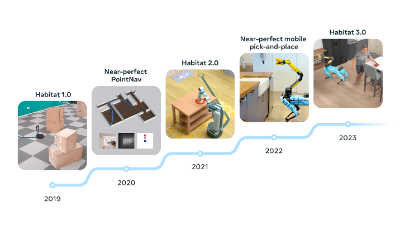
Meta Platforms Inc. 基础人工智能研究团队的研究人员今天表示,他们将发布 AI 模拟环境 Habitat 的更高级版本,用来教机器人如何与物理世界交互。