一文速通「机器人3D场景表示」发展史
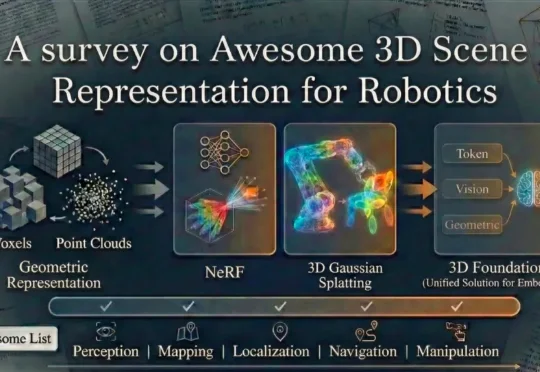
一文速通「机器人3D场景表示」发展史上海交通大学、波恩大学等院校的研究团队全面总结了当前机器人技术中常用的场景表示方法。这些方法包括传统的点云、体素栅格、符号距离函数以及场景图等传统几何表示方式,同时也涵盖了最新的神经网络表示技术,如神经辐射场、3D 高斯散布模型以及新兴的 3D 基础模型。
来自主题: AI技术研报
8743 点击 2026-01-24 10:31
 搜索
搜索
上海交通大学、波恩大学等院校的研究团队全面总结了当前机器人技术中常用的场景表示方法。这些方法包括传统的点云、体素栅格、符号距离函数以及场景图等传统几何表示方式,同时也涵盖了最新的神经网络表示技术,如神经辐射场、3D 高斯散布模型以及新兴的 3D 基础模型。