
OpenClaw全球首聚,千人挤爆旧金山!龙虾头机器人现场乱逛太炸裂
OpenClaw全球首聚,千人挤爆旧金山!龙虾头机器人现场乱逛太炸裂全球第一届OpenClaw蟹教聚会来了,开发者们众神云集,分享出一大波炸裂的开源项目。更可怕的是,OpenClaw开始控制机器人了,现场的啤酒据说都是机器人续的。「蟹徒」们纷纷高呼:感谢Peter,你让我们重生!
来自主题: AI资讯
9991 点击 2026-02-06 22:30
 搜索
搜索
全球第一届OpenClaw蟹教聚会来了,开发者们众神云集,分享出一大波炸裂的开源项目。更可怕的是,OpenClaw开始控制机器人了,现场的啤酒据说都是机器人续的。「蟹徒」们纷纷高呼:感谢Peter,你让我们重生!

硬氪独家获悉,人形机器人公司逐际动力LimX Dynamics已完成2亿美元的B轮融资。
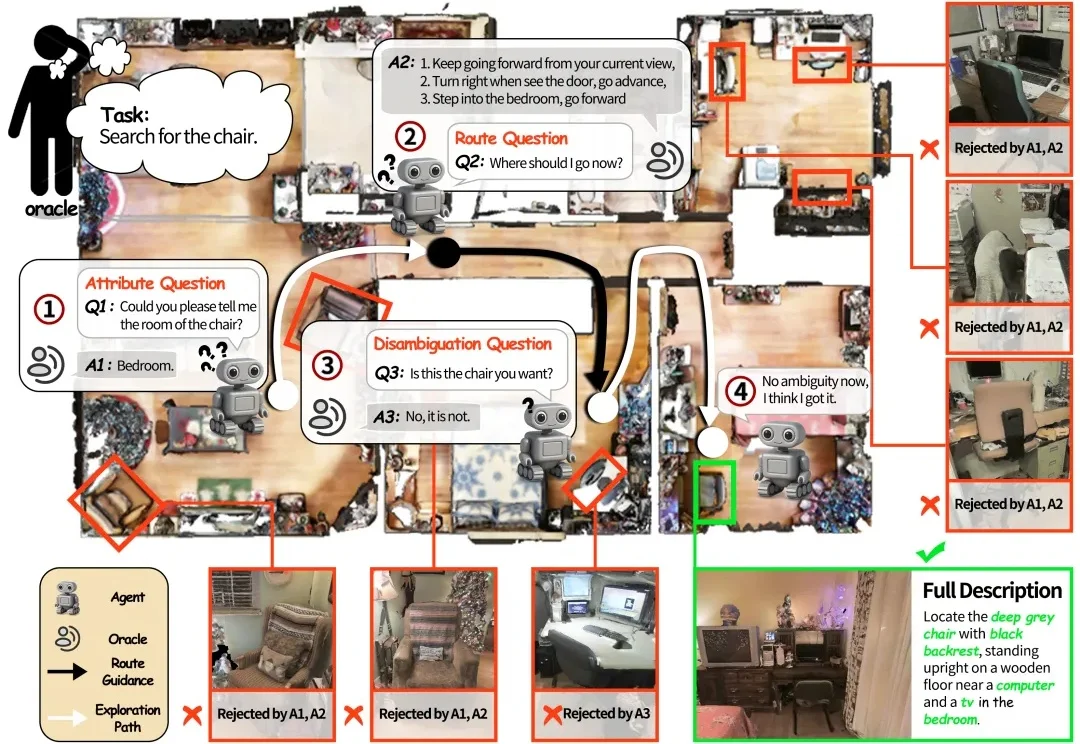
如果将一台在视觉语言导航(VLN)任务中表现优异的机器人直接搬进家庭场景,往往会遇到不少实际问题。
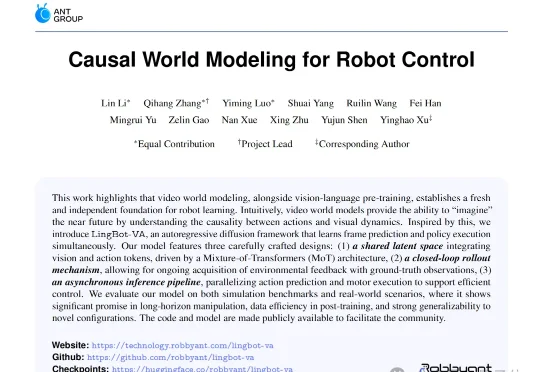
是蚂蚁灵波又又又又(连续第4天)开源的狠活儿——全球首个用于通用机器人控制的因果视频-动作世界模型,LingBot-VA。但LingBot-VA就不一样了,它通过自回归视频预测打破了这种思考方式,在动手之前,脑子里先把未来几秒的画面推演出来。
机器人领域是我们长期关注的赛道,而 Generalist 是当前机器人领域中极少数具备长期竞争潜力的公司,核心优势集中在数据规模、团队能力与清晰的 scaling 路径上。
5500台销量背后:揭开宇树人形机器人“真实买家”画像。

Figure 发布 Helix 02,机器人领域又要变天了

马斯克刚刚在特斯拉财报会议上宣布,Model S 和 Model X 两款车型即将在 2026 年第二季度停产,为了给机器人生产腾地。
美国机器人界掌管demo的神,Figure,冷不丁又出一拳!
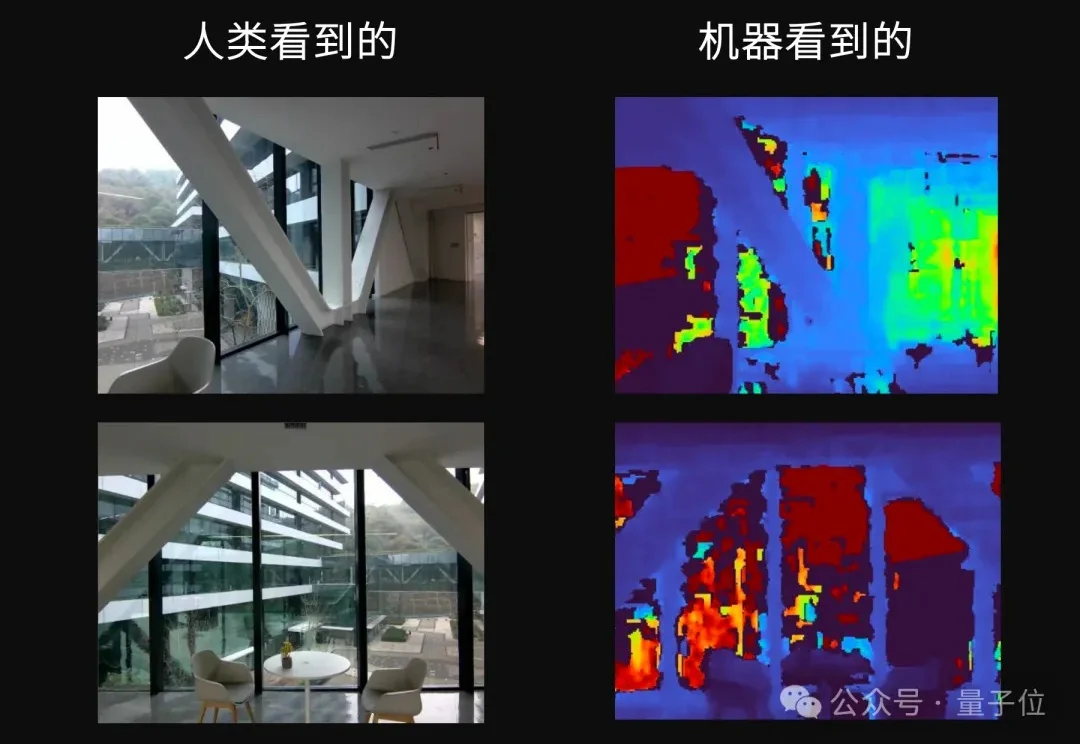
天下苦机器人看不清透明和反光物体久矣。