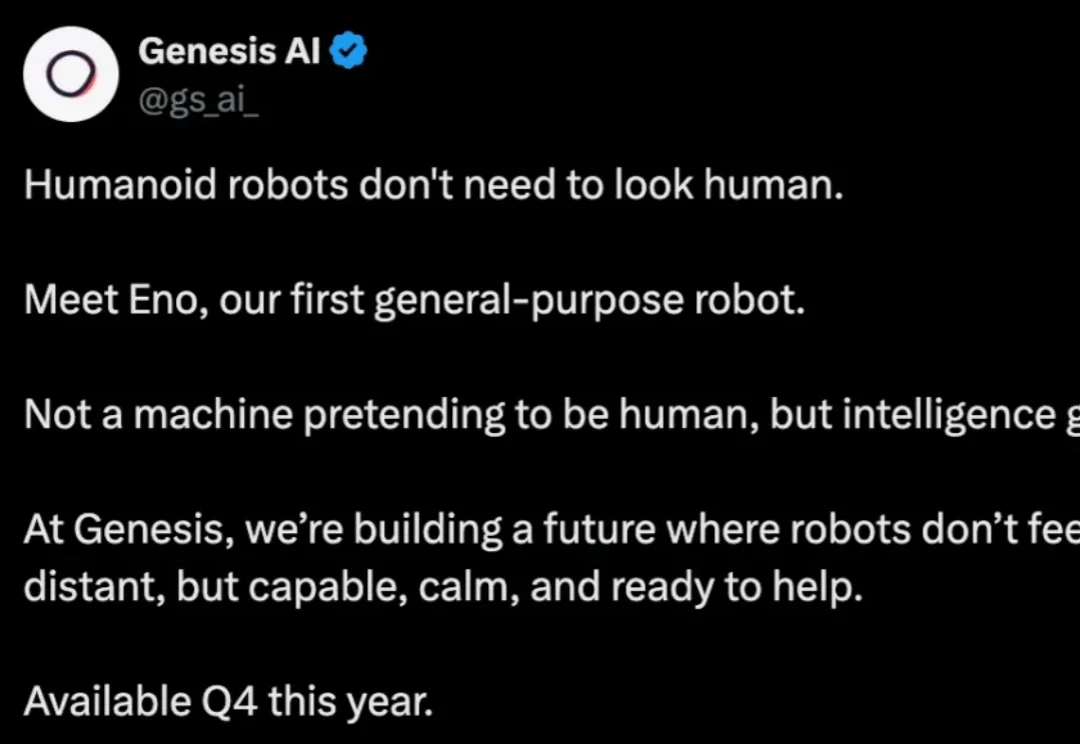
没有头,没有脚,还能三折叠,周衔团队发布首款「非人形」机器人
没有头,没有脚,还能三折叠,周衔团队发布首款「非人形」机器人通用机器人,不必长得像人。
来自主题: AI资讯
6084 点击 2026-06-17 14:04
 搜索
搜索
通用机器人,不必长得像人。
当大模型开始控制机械臂、家用机器人时,“安全”这件事也变得不一样了。
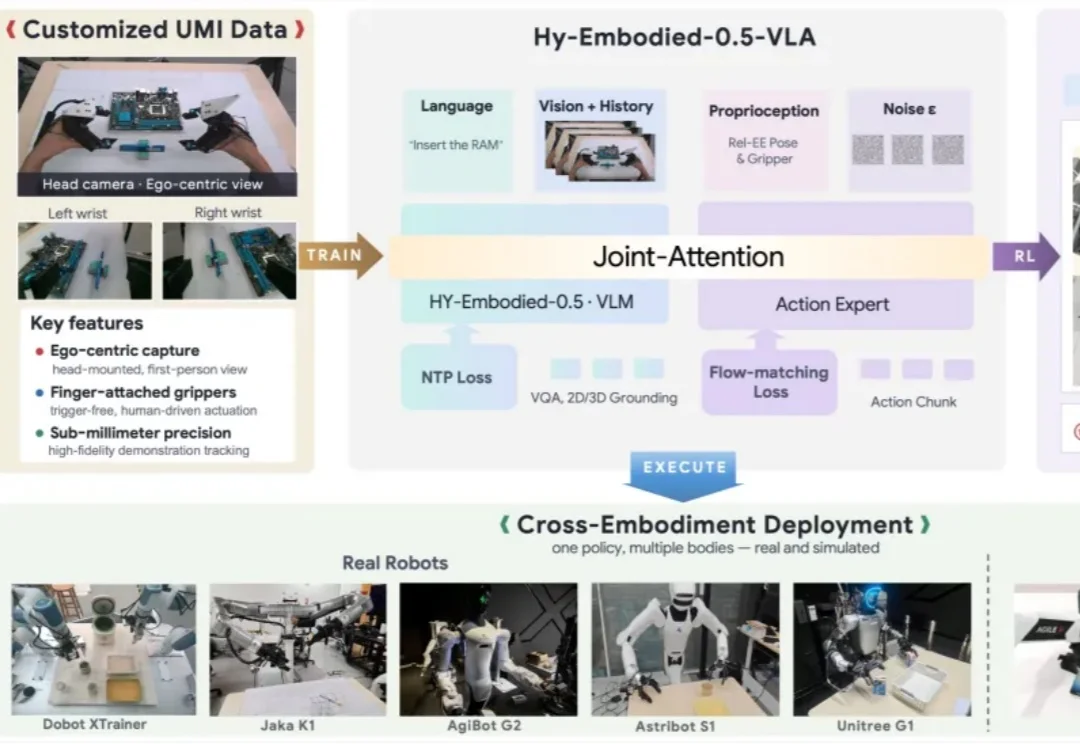
6 月 15 日,腾讯 Robotics X、福田实验室与混元团队联合发布面向真实世界机器人操作任务的端到端具身智能模型 Hy-Embodied-0.5-VLA(简称 HyVLA-0.5)。

刚刚,大晓机器人半年融资数亿美元,开悟世界模型同时刷新四大权威榜单第一,4B参数硬刚28B大模型!具身智能的「ChatGPT时刻」真的要来了?

过去一年,具身智能行业最热闹的画面是什么?

宇树机器人要攀登珠峰了!
具身智能领域新星OriginFlow(渊澈太初)宣布接连完成天使轮、战略轮、Pre-A1轮多轮融资,累计融资总额超5亿元人民币。创始人秦深涛,25岁。本科毕业于哈尔滨工业大学,目前是清华大学博士生。2025年创业,他率先提出并落地NeuroScale数据采集范式,以非侵入式运动神经接口为核心入口,为机器人采集长期缺失的物理交互数据。

极佳视界宣布又完成10亿元B2轮融资,由新加坡顶级跨境投资机构狮城资本(多轮持续追投)、中国-比利时基金(中比基金)、建投投资、万向钱潮、复星锐正、华盖创赢、金创投、德屹资本、华仓资本、元石基金等全球顶级国家队基金、产业资本、财务机构、国资平台共同投资,国中资本、达晨财智、图灵资管等多个老股东持续超额加注。

硬氪获悉,具身智能世界模型公司「千诀科技」日前完成数亿元A轮融资,本轮由京铭资本领投,山东新动能、山东财金资本、元禾厚望、芯能创投、南创投、英诺天使基金、尚势资本、仁爱集团、玄素投资等机构共同投资,投资方阵容汇集了国家队、产业方、市场化基金及家族办公室。Maple Pledge枫承资本长期出任私募股权融资顾问。

当 AI 教育从屏幕走向物理世界,松延动力正用小布米、课程体系和「学校—机构—家庭」生态闭环,把 K12 机器人教育变成具身智能走进千家万户的第一站。