
银河通用全新模型统一机器人导航任务,7B参数模型支持实时部署
银河通用全新模型统一机器人导航任务,7B参数模型支持实时部署北京大学,银河通用,阿德莱德大学,浙江大学等机构合作,探究如何构建具身导航的基座模型(Embodied Navigation Foundation Model)提出了NavFoM,一个跨任务和跨载体的导航大模型。实现具身导航从“专用”到“通用”的技术跃进
来自主题: AI技术研报
8737 点击 2025-11-09 15:34
 搜索
搜索
北京大学,银河通用,阿德莱德大学,浙江大学等机构合作,探究如何构建具身导航的基座模型(Embodied Navigation Foundation Model)提出了NavFoM,一个跨任务和跨载体的导航大模型。实现具身导航从“专用”到“通用”的技术跃进
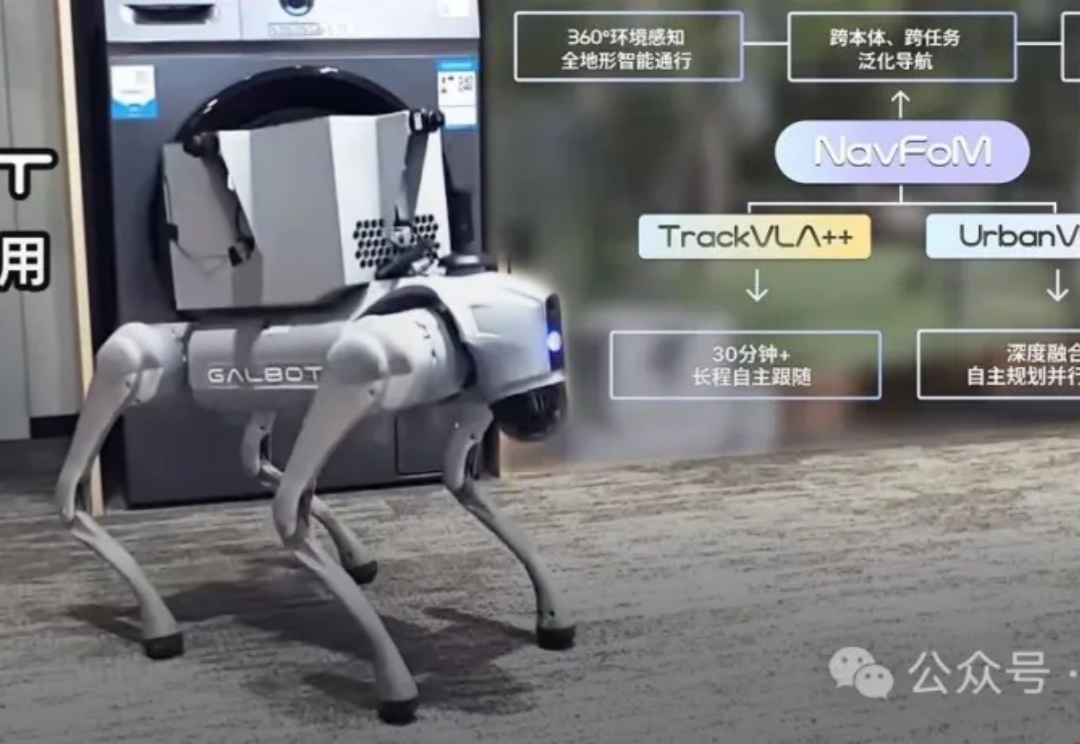
银河通用联合多所大学发布了全球首个跨本体全域环视导航基座大模型NavFoM,让机器人能自己找路,而不再依赖遥控,从而推动具身智能向规模化商业落地演进。