两张图就能重构3D空间?清华&NTU利用生成模型解锁空间智能新范式
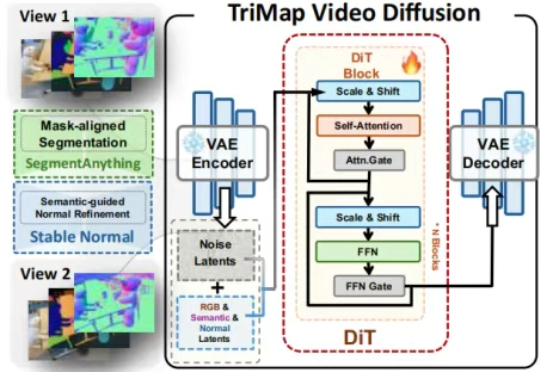
两张图就能重构3D空间?清华&NTU利用生成模型解锁空间智能新范式最少只用2张图,AI就能像人类一样理解3D空间了。ICCV 2025最新中稿的LangScene-X:以全新的生成式框架,仅用稀疏视图(最少只用2张图像)就能构建可泛化的3D语言嵌入场景,对比传统方法如NeRF,通常需要20个视角。
来自主题: AI技术研报
8566 点击 2025-07-09 11:08
 搜索
搜索
最少只用2张图,AI就能像人类一样理解3D空间了。ICCV 2025最新中稿的LangScene-X:以全新的生成式框架,仅用稀疏视图(最少只用2张图像)就能构建可泛化的3D语言嵌入场景,对比传统方法如NeRF,通常需要20个视角。
AI现在真能救命!传统的心脏MRI(磁共振成像)检查可能遗漏的关键风险信号,现在能够被AI捕捉了。
曾几何时,用文字生成图像已经变得像用笔作画一样稀松平常。
让游戏行业真正成为创意产业,而不是劳动密集型产业。

万万没想到。我居然收到了人生中,AI送给我的第一杯奶茶。
中科院自动化所提出BridgeVLA模型,通过将3D输入投影为2D图像并利用2D热图进行动作预测,实现了高效且泛化的3D机器人操作学习。
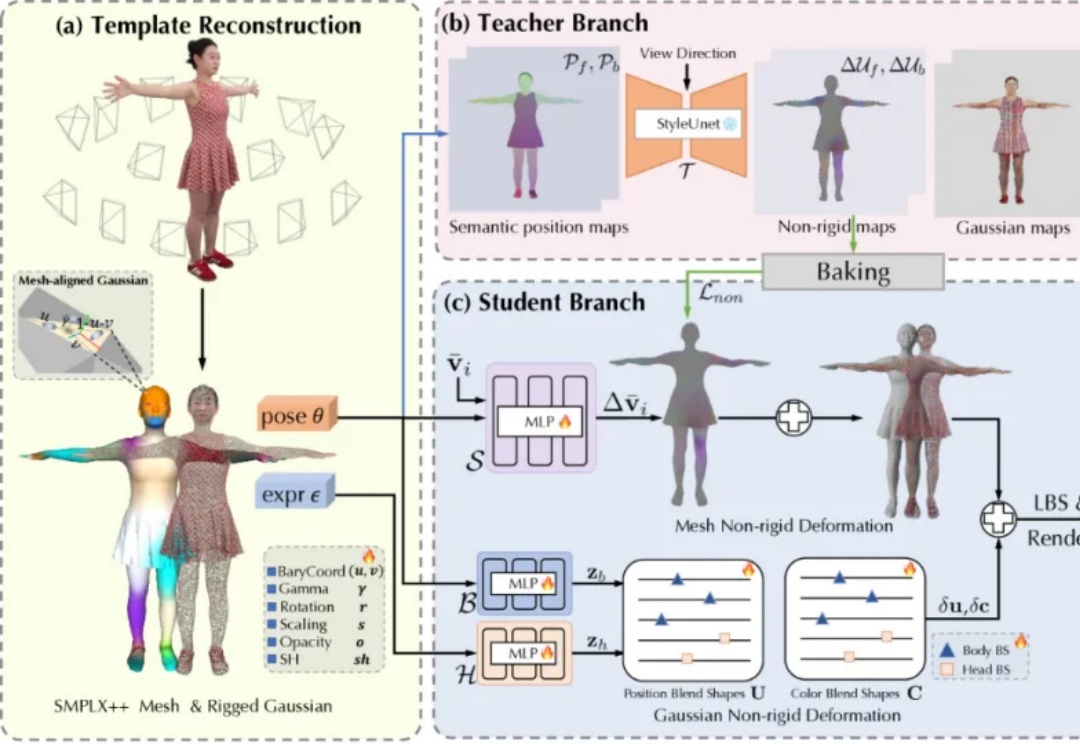
TaoAvatar 是由阿里巴巴淘宝 Meta 技术团队研发的 3D 真人数字人技术,这一技术能在手机或 XR 设备上实现 3D 数字人的实时渲染以及 AI 对话的强大功能,为用户带来逼真的虚拟交互体验。
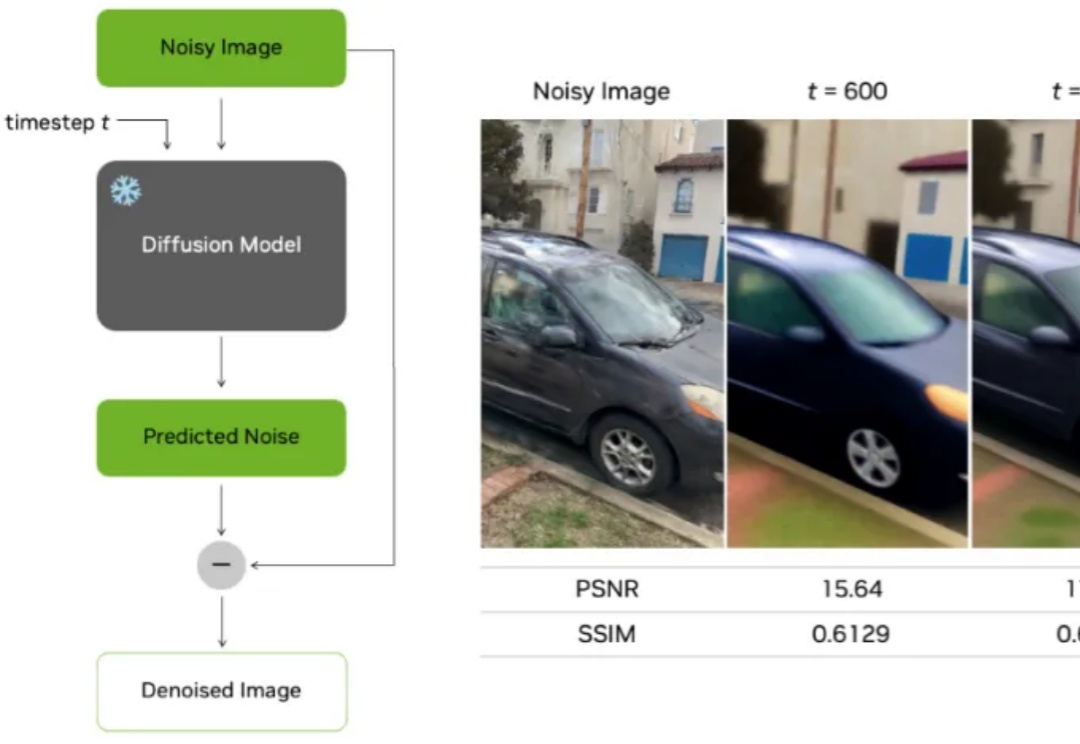
在 3D 重建领域,无论是 NeRF 还是最新的 3D Gaussian Splatting(3DGS),在生成逼真新视角时仍面临一个核心难题:视角一旦偏离训练相机位置,图像就容易出现模糊、鬼影、几何错乱等伪影,严重影响实际应用。

一个融合真实地理空间与AI生成技术的开放世界模拟平台,由Genesis物理引擎驱动,支持人类与机器人在社区中共同互动、成长与演化。
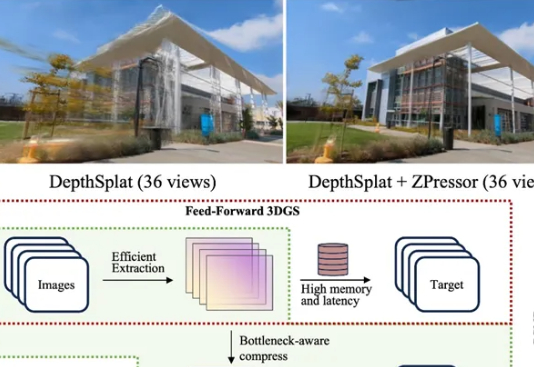
ZPressor能高效压缩3D高斯泼溅(3DGS)模型的多视图输入,解决其在处理密集视图时的性能瓶颈,提升渲染效率和质量。