
谷歌大脑之父首次坦白!茶水间闲聊引爆万亿帝国,AI自我突破触及门槛
谷歌大脑之父首次坦白!茶水间闲聊引爆万亿帝国,AI自我突破触及门槛刚刚,AI界传奇Jeff Dean深度访谈重磅放出!作为谷歌大脑奠基人、TensorFlow与TPU背后的关键推手,他亲述了这场神经网络革命的非凡历程。
来自主题: AI资讯
8272 点击 2025-08-25 11:29
 搜索
搜索
刚刚,AI界传奇Jeff Dean深度访谈重磅放出!作为谷歌大脑奠基人、TensorFlow与TPU背后的关键推手,他亲述了这场神经网络革命的非凡历程。
Yann LeCun的AI故事,纪录片回顾了这位深度学习先驱的四十年历程。从索邦大学的孤独探索,到贝尔实验室发明卷积神经网络、推动支票识别商用,再与Hinton、Bengio共创深度学习革命,他始终坚信机器应学会学习。

Figure人形机器人首秀,靠神经网络叠衣服! 在没有任何架构改变、仅增加了数据的情况下,就让原本在物流场景干活的它,轻松习得了新技能。
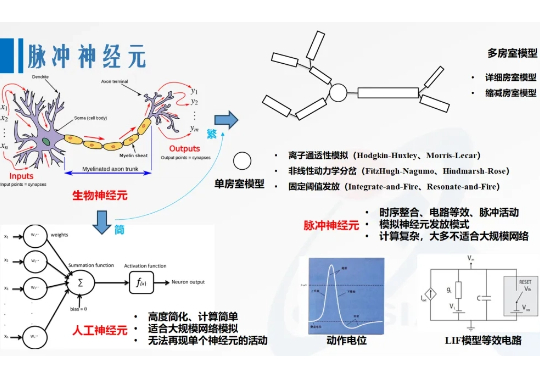
1997年,Wolfgang Maass于Networks of spiking neurons: The third generation of neural network models一文中提出,由脉冲神经元构成的网络——脉冲神经网络(SNN),能够展现出更强大的计算特性,会成为继人工神经网络后的“第三代神经网络模型”[6]。
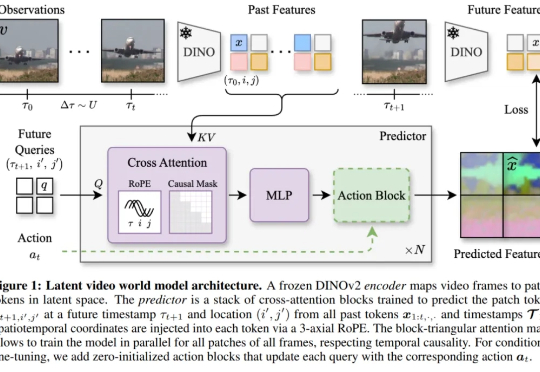
2018 年,LSTM 之父 Jürgen Schmidhuber 在论文中( Recurrent world models facilitate policy evolution )推广了世界模型(world model)的概念,这是一种神经网络,它能够根据智能体过去的观察与动作,预测环境的未来状态。
持续适应性学习,即指适应环境并提升表现的能力,是自然智能与人工智能共有的关键特征。大脑达成这一目标的核心机制在于神经递质调控(例如多巴胺DA、乙酰胆碱ACh、肾上腺素)通过设置大脑全局变量来有效防止灾难性遗忘,这一机制有望增强人工神经网络在持续学习场景中的鲁棒性。本文将概述该领域的进展,进而详述两项6月Nature发表的背靠背相关研究。
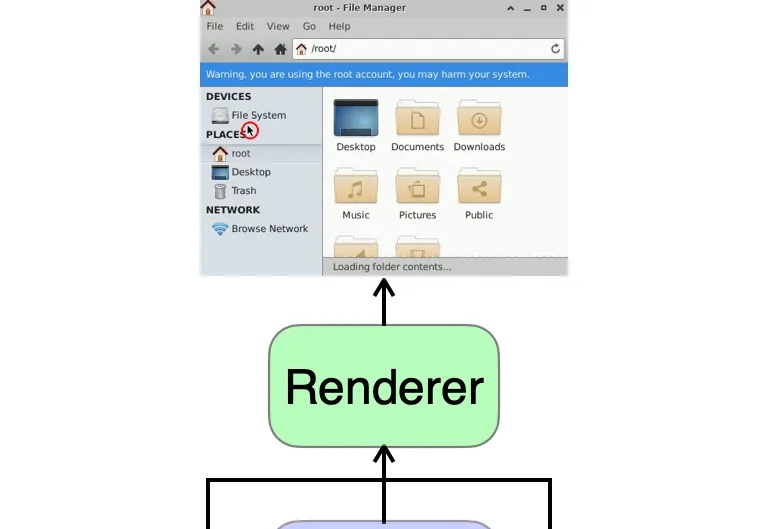
疯狂,太疯狂了~ 大神卡帕西预测的「下一代GUI系统」这就水灵灵地实现了?!

以神经网络为核心引擎,让AI承担雷达仿真数据生成任务,还实现对雷达物理特性的建模与控制——
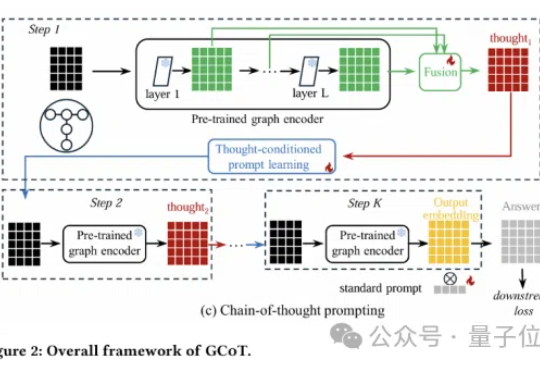
图神经网络还能更聪明?思维链提示学习来了!
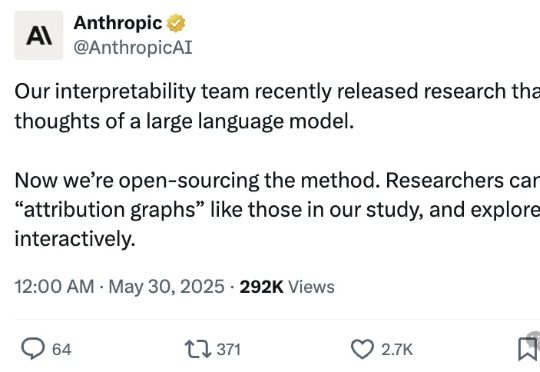
Claude团队来搞开源了——推出“电路追踪”(circuit tracing)工具,可以帮大伙儿读懂大模型的“脑回路”,追踪其思维过程。该工具的核心在于生成归因图(attribution graphs),其作用类似于大脑的神经网络示意图,通过可视化模型内部超节点及其连接关系,呈现LLM处理信息的路径。