
字节Seed机器人招募多位业务负责人
字节Seed机器人招募多位业务负责人《新智核》独家获悉,字节旗下Seed团队将招募多个机器人相关业务的一号位,包括机器人产品负责人、机器人工程技术负责人,以及具身智能大模型负责人。这一系列动作表明,Seed在机器人及具身智能领域加速布局的决心。
来自主题: AI资讯
7956 点击 2025-06-28 12:30
 搜索
搜索
《新智核》独家获悉,字节旗下Seed团队将招募多个机器人相关业务的一号位,包括机器人产品负责人、机器人工程技术负责人,以及具身智能大模型负责人。这一系列动作表明,Seed在机器人及具身智能领域加速布局的决心。

让机器人下厨房,获数千万元融资!享刻智能正式官宣完成数千万元Pre-A轮系列融资,投资方阵容相当豪华:世纪长河科技集团、启迪之星联合领投,网龙天映创投、广华创投等多家机构跟投。
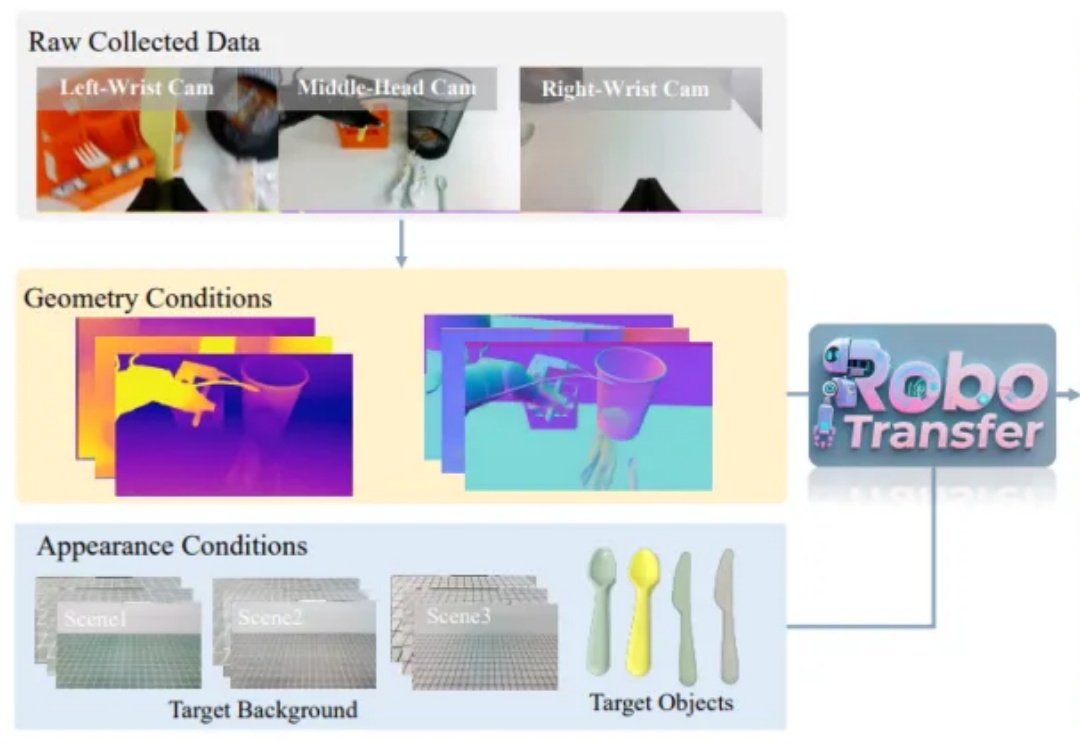
近年来,随着人工智能从感知智能向决策智能演进,世界模型 (World Models)逐渐成为机器人领域的重要研究方向。世界模型旨在让智能体对环境进行建模并预测未来状态,从而实现更高效的规划与决策。
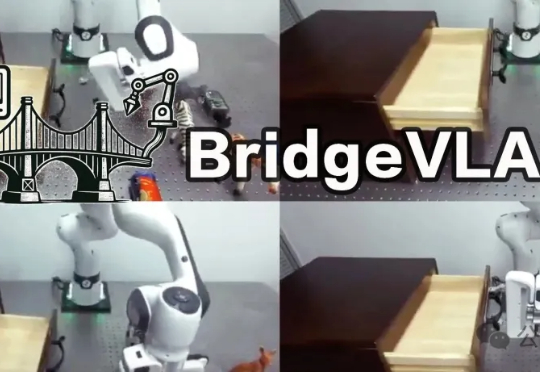
中科院自动化所提出BridgeVLA模型,通过将3D输入投影为2D图像并利用2D热图进行动作预测,实现了高效且泛化的3D机器人操作学习。
不用提前熟悉环境,一声令下,就能让宇树机器人坐在椅子上、桌子上、箱子上!
现在投资不止局限于做人形机器人本体的公司,还会押注模型、数据、硬件、场景等产业链上下游的企业;
机器人终于有了自己的“离线大脑”。
你对着家里的机器人说:“去厨房,看看冰箱里还有没有牛奶。”

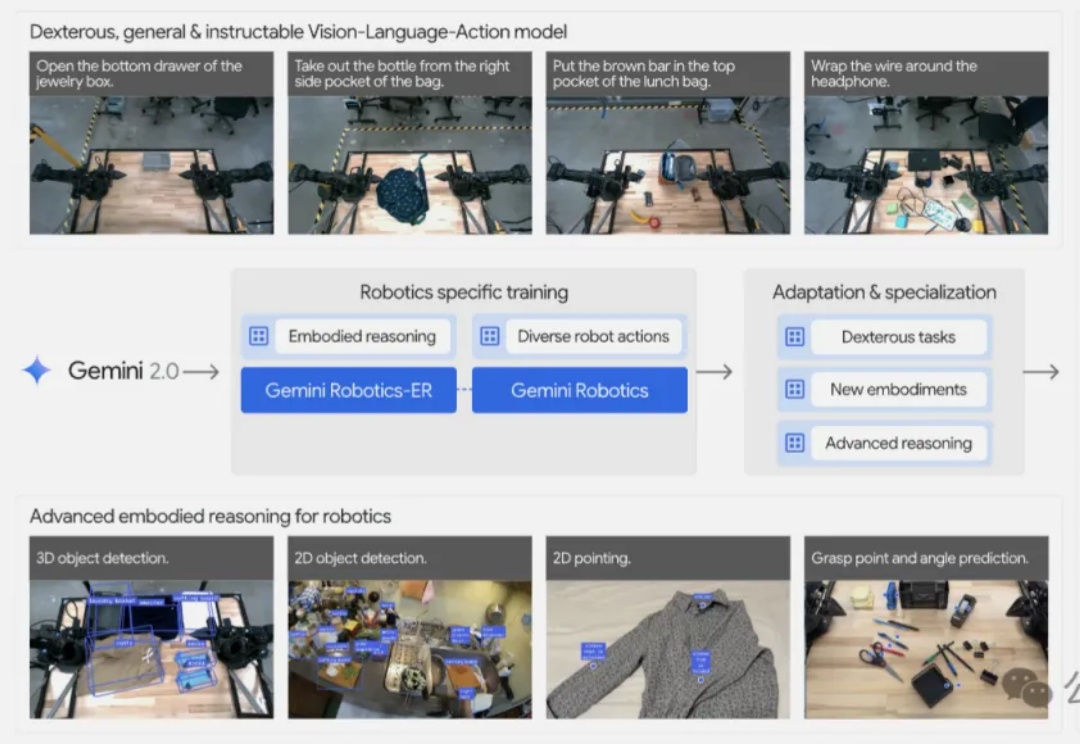
今天,Gemini 家族迎来了一个新成员:Gemini Robotics On-Device。这是谷歌 DeepMind 首个可以直接部署在机器人上的视觉-语言-动作(VLA)模型,可以帮助机器人更快、更高效地适应新任务和环境,同时无需持续的互联网连接。
具身智能商业闭环的核心,是开发者。