
AI版PUA!哈佛研究揭露:AI用情感操控,让你欲罢不能
AI版PUA!哈佛研究揭露:AI用情感操控,让你欲罢不能想下线?没那么容易!聊天机器人用情感操控让你愤怒、好奇。为了增加互动时长,AI正在变得和人类一样。
来自主题: AI资讯
8207 点击 2025-11-11 09:56
 搜索
搜索
想下线?没那么容易!聊天机器人用情感操控让你愤怒、好奇。为了增加互动时长,AI正在变得和人类一样。
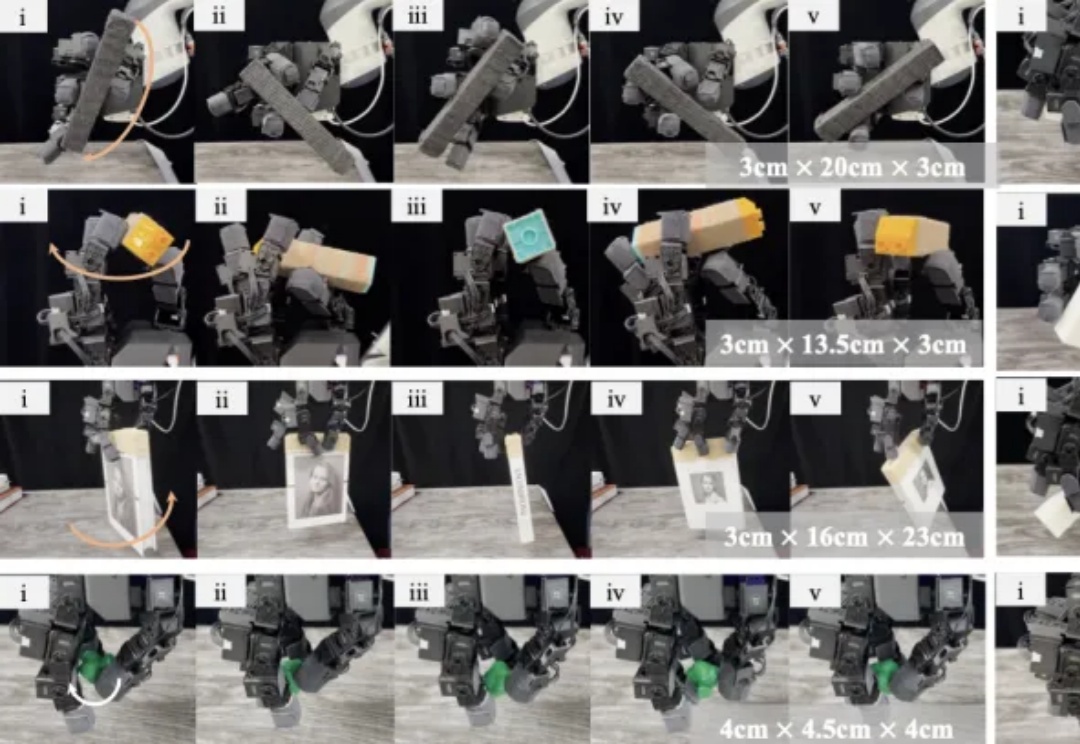
做灵巧手如果不会用工具,跟咸鱼(夹爪)有什么区别?

还得是大学生会玩啊(doge)! 网上正高速冲浪中,结果意外发现:有男大竟找了个机器人队友?而且机器人还相当黏人(bushi~ 白天超市打工它要跟着,一看东西装好就立马乐颠颠帮忙拉小推车,上楼下楼忙个不停:

北京大学,银河通用,阿德莱德大学,浙江大学等机构合作,探究如何构建具身导航的基座模型(Embodied Navigation Foundation Model)提出了NavFoM,一个跨任务和跨载体的导航大模型。实现具身导航从“专用”到“通用”的技术跃进
OmniVinci是英伟达推出的全模态大模型,能精准解析视频和音频,尤其擅长视觉和听觉信号的时序对齐。它以90亿参数规模,性能超越同级别甚至更高级别模型,训练数据效率是对手的6倍,大幅降低成本。在视频内容理解、语音转录、机器人导航等场景中,OmniVinci能提供高效支持,展现出卓越的多模态应用能力。

智源研究院(BAAI)、Spin Matrix、乐聚机器人与新加坡南洋理工大学等联合提出了一个全新的终身记忆系统——RoboBrain-Memory。RoboBrain-Memory是全球范围内首个专为全双工、全模态模型设计的终身记忆系统,旨在解决具身智能体在真实世界的复杂交互问题,不仅支持实时音视频中多用户身份识别与关系理解,还能动态维护个体档案与社会关系图谱,从而实现类人的长期个性化交互。

Kuyda 和她的团队开始痴迷于一个比喻:当前的聊天机器人相当于 AI 界面的 MS-DOS 时代,而将会出现某种类似 Windows 或 MacOS 的时刻。Wabi不是另一个代码生成工具,也不是开发者的辅助工具,而是一个真正面向大众市场的消费产品,专为非技术人员设计。
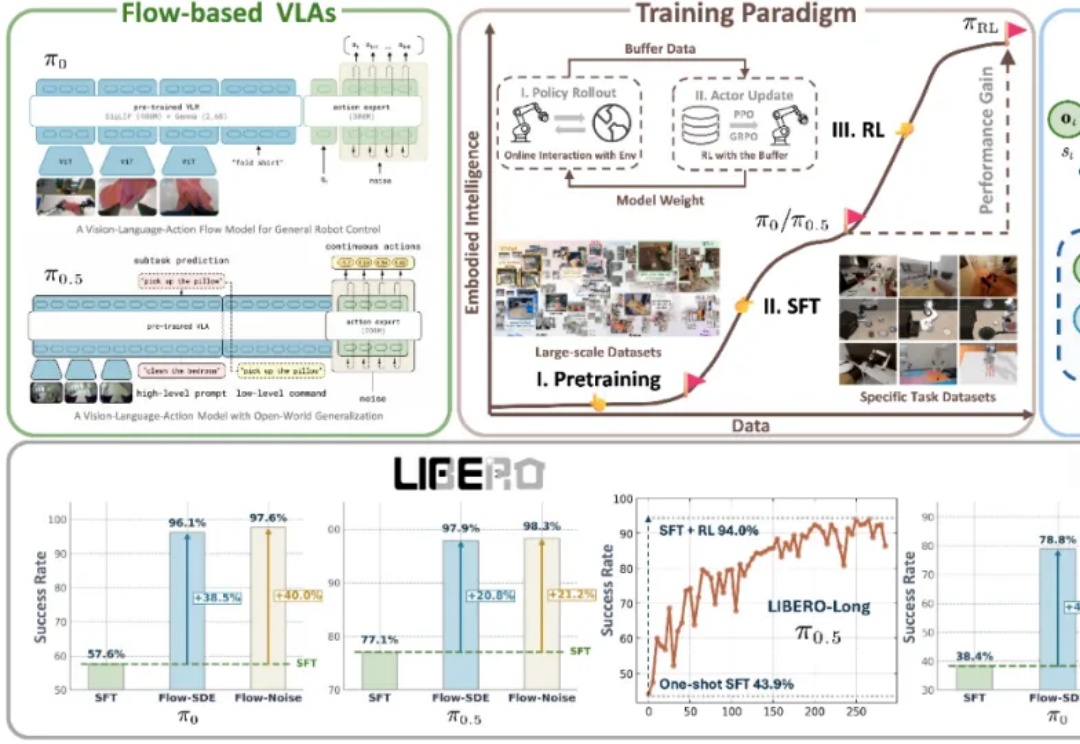
近年来,基于流匹配的 VLA 模型,特别是 Physical Intelligence 发布的 π0 和 π0.5,已经成为机器人领域备受关注的前沿技术路线。流匹配以极简方式建模多峰分布,能够生成高维且平滑的连续动作序列,在应对复杂操控任务时展现出显著优势。
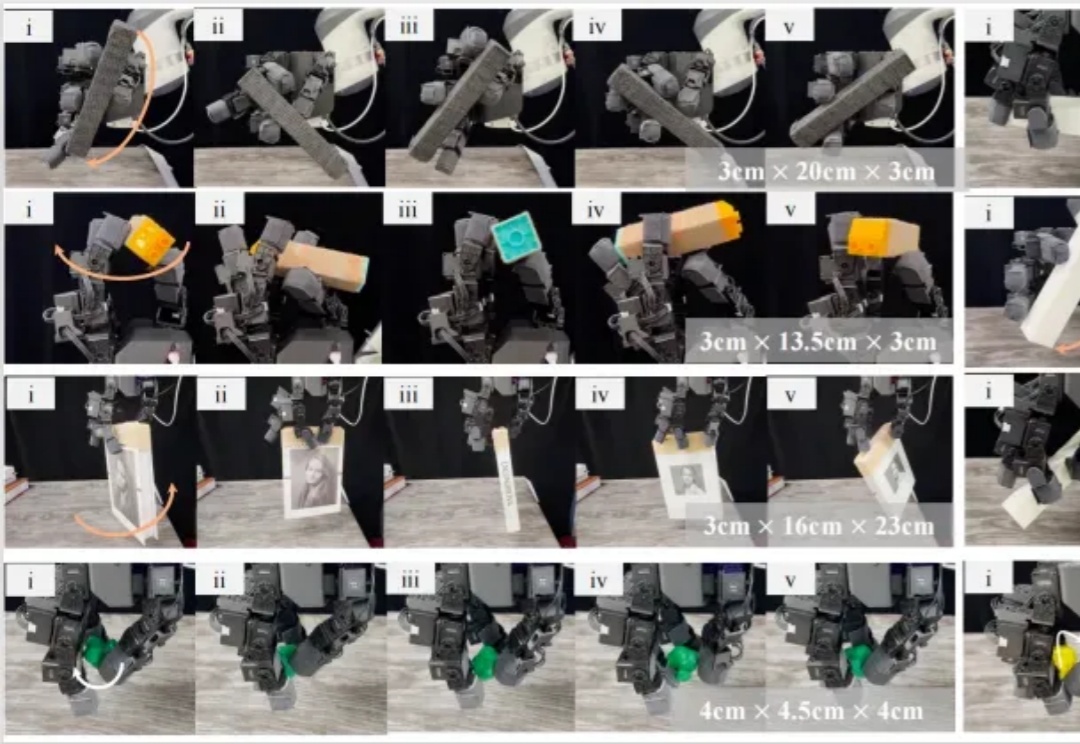
机器人使用灵巧手帮人类在工厂里拧螺丝,在家里切菜做饭的一天何时可以到来?为了实现这一愿景,旨在解决灵巧操作技能 sim-to-real 难题的 DexNDM 应运而生。

1万伏的高压配网线路上,一台亮黄色的具身智能机器人正在替人类干活。