curl 项目创始人被 AI“逼疯”,怒斥垃圾报告堪比 DDoS 攻击!网友:但老板们认为 AI 无所不能
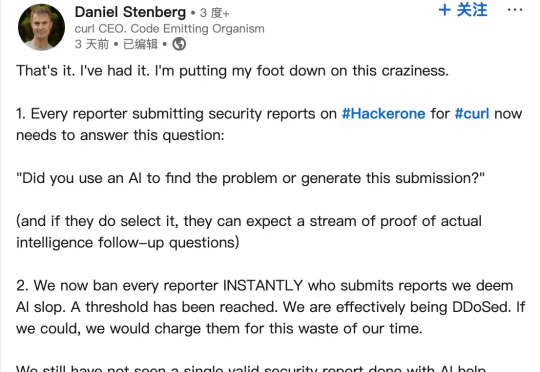
curl 项目创始人被 AI“逼疯”,怒斥垃圾报告堪比 DDoS 攻击!网友:但老板们认为 AI 无所不能近日,curl 项目(一款用于通过 URL 传输数据的命令行工具和库)创始人 Daniel Stenberg 在领英发帖称,已经受够了由 AI 生成的大量“垃圾”漏洞报告,因此近期引入额外复选框,用以过滤此类平白浪费维护人员时间的低效提交内容。
来自主题: AI资讯
8782 点击 2025-05-09 17:46