ICML 2026 | 大模型为什么算不对加法?南大团队提出等本位和轨迹,揭示LLM算术错误的几何机制
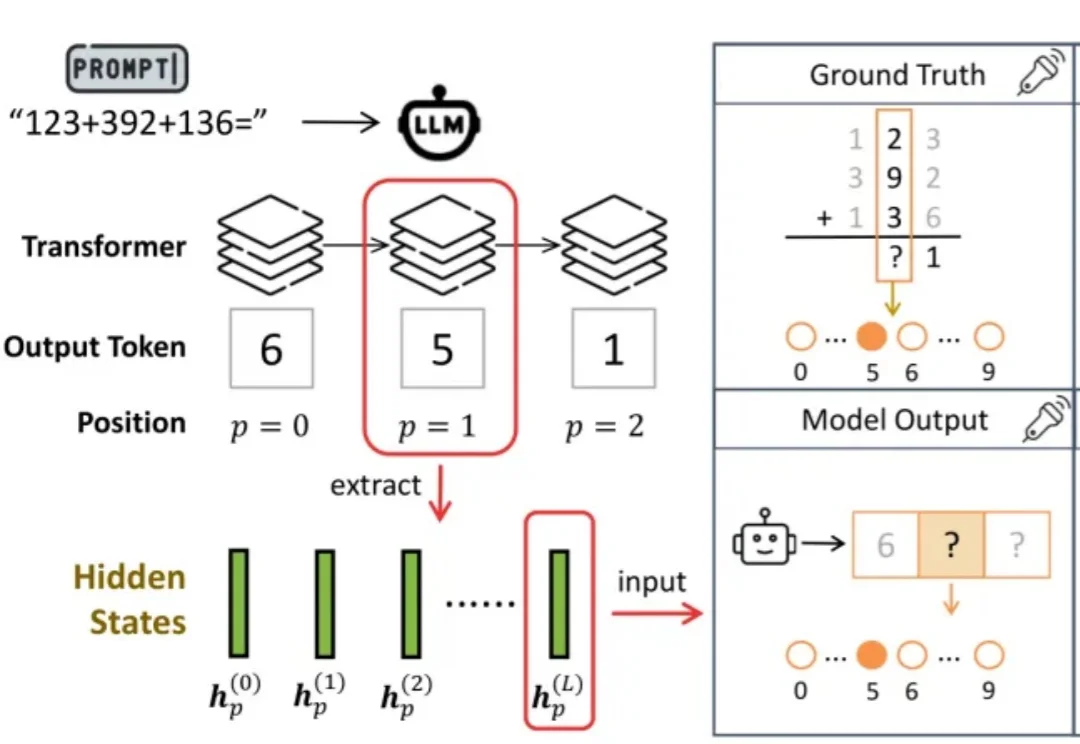
ICML 2026 | 大模型为什么算不对加法?南大团队提出等本位和轨迹,揭示LLM算术错误的几何机制尽管大语言模型(Large Language Models, LLMs)在复杂数学推理、代码生成和知识问答上表现突出,但它们仍常在多位数加法这类基础算术任务上犯错。
来自主题: AI技术研报
7420 点击 2026-06-17 14:05
 搜索
搜索
尽管大语言模型(Large Language Models, LLMs)在复杂数学推理、代码生成和知识问答上表现突出,但它们仍常在多位数加法这类基础算术任务上犯错。
随着大语言模型逐步从「单轮问答」走向「真实环境中的持续交互」,LLM agents 正在被用于越来越复杂的 agentic applications:deep research、coding、computer use、customer service、medical inquiry、troubleshooting 等等。
被ICML 2026接收为Spotlight!
雨雪、雾霾、镜头噪点、压缩失真、夜间弱光……
随着AI Coding、Agent、Deep Research 等应用快速普及,模型单次处理的上下文长度正在从几万Token迈向几十万甚至百万Token。
想象一下,你问 AI 要一个饮食记录工具,它不再是回你一段文字建议,而是直接给你一个可以点击添加、统计热量的完整应用。人和 AI 的交互,正在从「读文字」走向「用应用」。
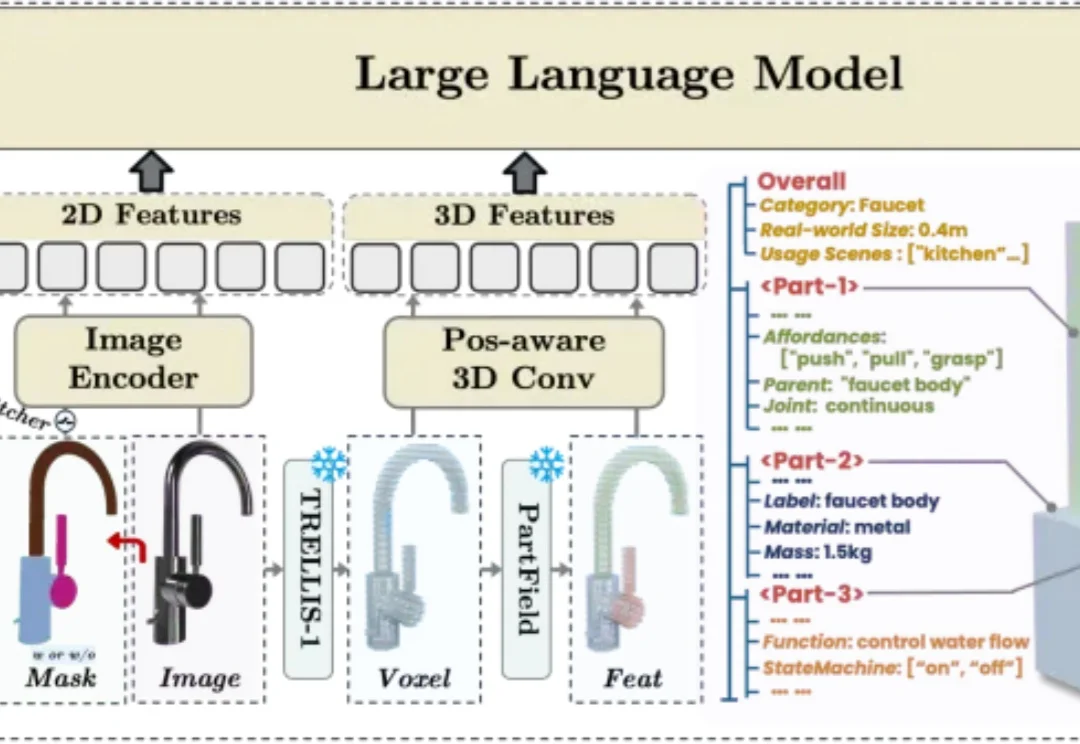
在交互式虚拟世界和具身智能快速发展的今天,高质量 3D 资产已经不再只是 “看起来像” 就足够。一个柜门不仅要有柜门的外观,还需要知道绕哪条轴旋转;一个按钮不仅要有按钮的形状,还需要具备 “按下 / 弹起” 的状态;一个抽屉不仅要有完整几何,还需要拥有滑动方向、运动范围、材质和质量等物理属性。该研究已被 ICML 2026 接收。
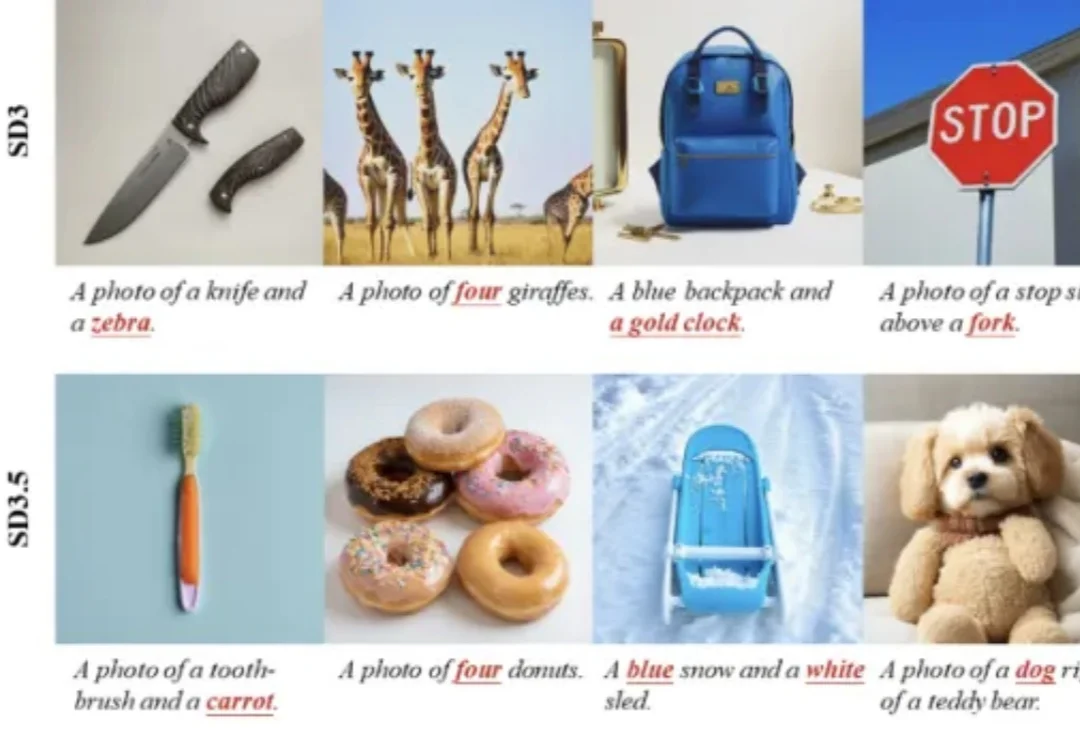
近年来,文生图模型的能力快速提升。从 Stable Diffusion 到 FLUX、Qwen-Image,扩散模型已经能够生成高质量图像,也能处理越来越复杂的文本提示。

北大彭宇新团队提出「美学照片重构」新任务,从摄影教学视频中自动构建数据集AesRecon,并开发两阶段模型AesFormer,通过优化构图、视角与人物姿态,提升照片的美感与艺术表现力。
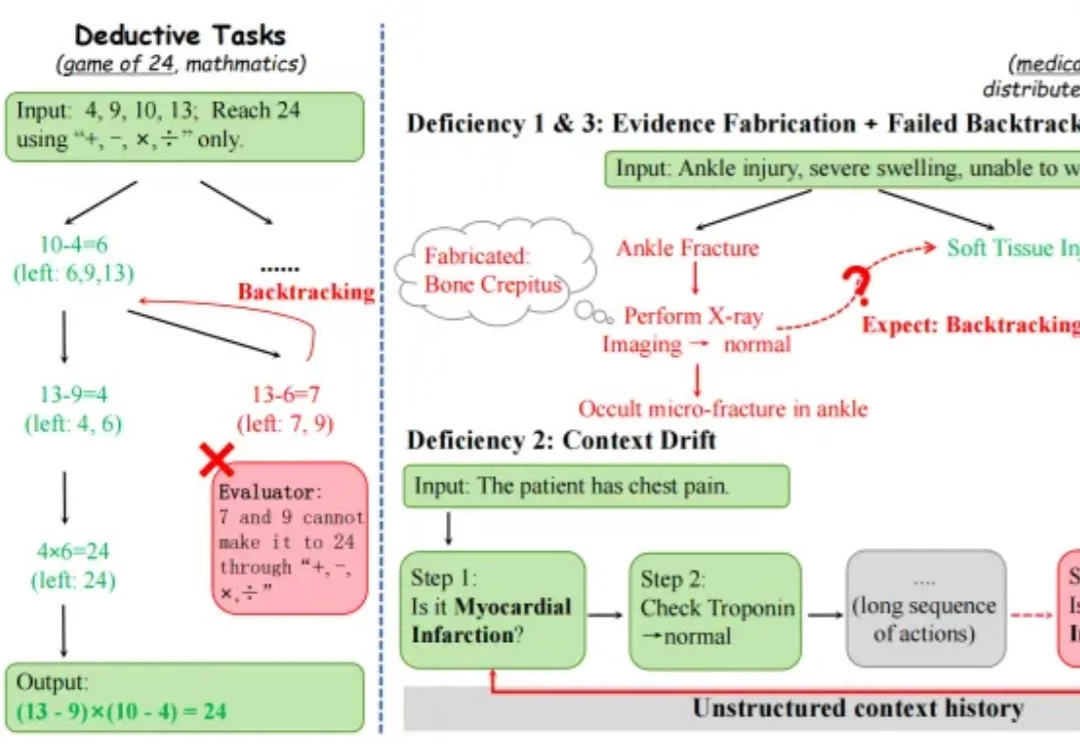
近年来,大语言模型在数学、代码等任务上的表现不断刷新上限,但到了医疗诊断、故障排查这类真实世界任务里,真正困难的是让多个智能体在不确定的动态环境中持续协作推理。